Hello Rachel,
I spoke to my colleague in Germany who usually deals with GPU issues. He has two suggestions.
First, we need to test CarMaker without all the ROS stuff. I expect the problem is with the GPU libraries and integration, but I can only be sure if we test with pure CarMaker.
Go to your CarMaker installation folder and find the “CM” executable file. If you have installed CarMaker in the default path, then the default location of the executable is here:
“/opt/ipg/carmaker/linux64-11.01/bin”
From this location, start CarMaker by calling the executable: ./CM
Create a new project. File - Project Folder - Create Project

Open the following example test run in CarMaker:
File - Open - Product Examples (this is the menu on the left hand side of the window) - Examples - BasicFunctions - Sensors - LidarRSI_Countryside
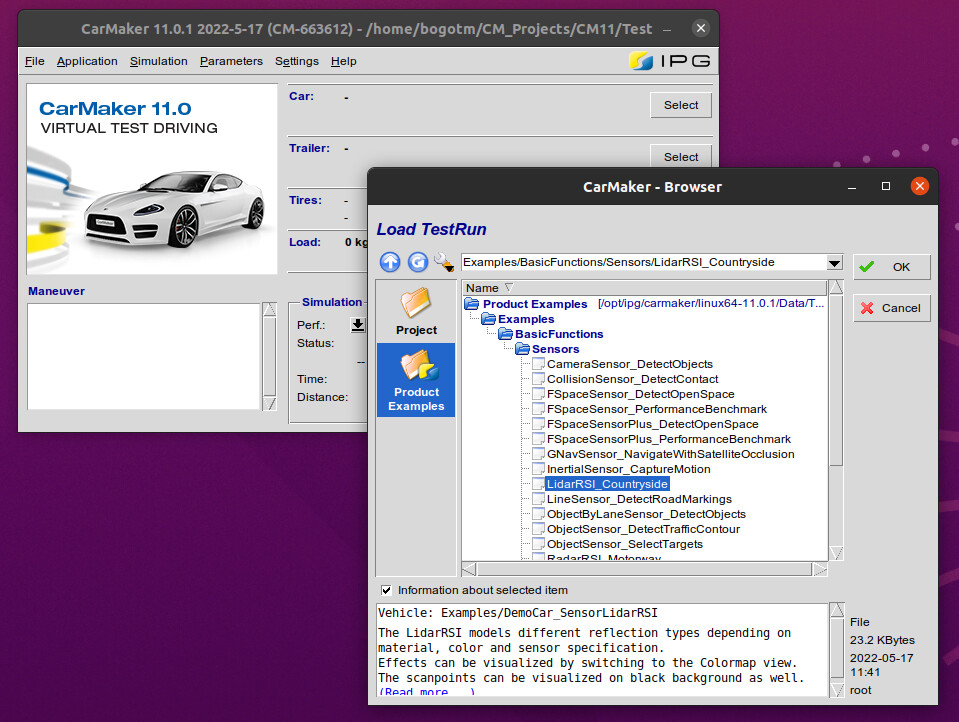
This is our basic LiDAR demo. Try to start it. I expect it to fail, but do let me know if it actually succeeds.
If (when) the previous example fails to start, close CarMaker.
Now start CarMaker again with the following startup flag: ./CM -debuggpu
You should still be in the same project that you previously created.
Open the same test run LidarRSI_Countryside
Attempt to start the test run.
The terminal where you started CarMaker should now have a lot more debugging information on exactly what is happening with the GPU and its connection to CarMaker.
Please post the logs here so that our experts can review them.