Hello everyone!
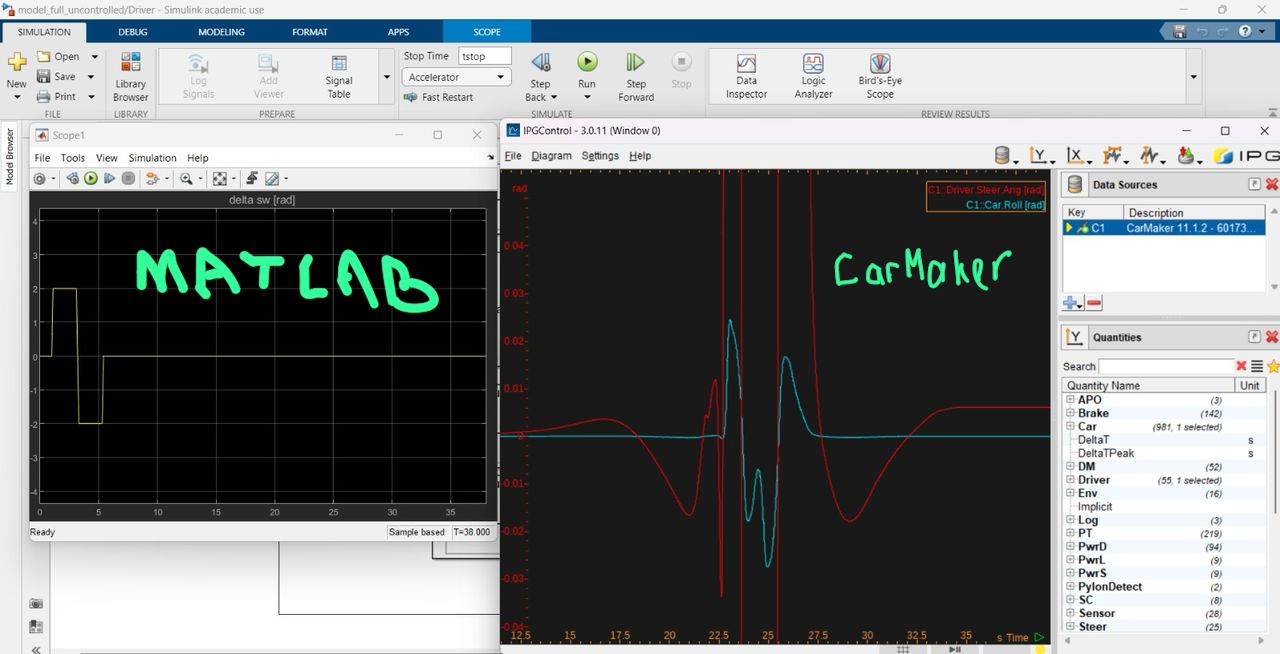
I am a student and currently researching EVs and their power loss. For this, I have created an 8-DOF Model in MATLAB and would like to verify it using IPG CarMaker by using different maneuvers such as step steer, ramp steer, and double lane changing. I need some help modifying the maneuvers in CarMaker so that it would be the same as the graph in MATLAB. I have already achieved it for the step steer but right now struggling with the double lane changing. I have also attached some images and the coding of the maneuver in MATLAB to make this clear, hope there is someone to help me out. Thank you!
Double step steer v=100
pedal_mode = 0; 0 -> speed tracking; 1 -> pedal tracking
steer_mode = 1; 0 → trajectory tracking; 1 → steering tracking
tbase = [0, 1, 1.1, 3.1, 3.3, 5.3, 5.4, 8]; [s] time base
steer = [0, 0, 2, 2, -2, -2, 0, 0]; [rad] steering wheel angle
pedal = [0.2, 0.2, 0.2, 0.2, 0.2, 0.2, 0.2, 0.2]; [-] normalised pedal position
speed = [v, v, v, v, v, v, v, v]; [m/s] reference speed
Above is the maneuver in MATLAB and currently need the exact maneuver in CarMaker to obtain similar graphs in both.
Good morning,
have you checked the example already available in CM
Examples/VehicleDynamics/Handling/LaneChange_ISO
Hello there, yes I have already tried the existing example in CM but the graph was not as expected. I would like to know if there is any chance to run the maneuver below to obtain the graph in the first picture, titled MATLAB.
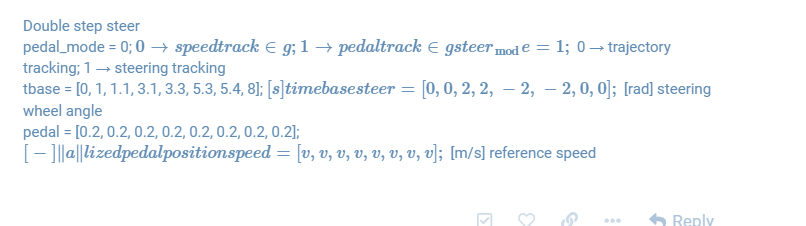
Double step steer
pedal_mode = 0; 0 -> speed tracking; 1 -> pedal tracking
steer_mode = 1; 0 → trajectory tracking; 1 → steering tracking
tbase = [0, 1, 1.1, 3.1, 3.3, 5.3, 5.4, 8]; [s] time base
steer = [0, 0, 2, 2, -2, -2, 0, 0]; [rad] steering wheel angle
pedal = [0.2, 0.2, 0.2, 0.2, 0.2, 0.2, 0.2, 0.2]; [-] normalized pedal position
speed = [v, v, v, v, v, v, v, v]; [m/s] reference speed
Good morning,
can you please rewrite the manuovre and list for each of the manouvre
- Steering angle
- pedal position (throttle, brake and clutch)
-gear number (if Transmission is present)
?
What I can see here is not very clear.
Sure @roberto.ortolan
Double step steer
pedal_mode = 0; 0 -> speed tracking; 1 -> pedal tracking
steer_mode = 1; 0 → trajectory tracking; 1 → steering tracking
tbase = [0, 1, 1.1, 3.1, 3.3, 5.3, 5.4, 8]; [s] time base
steer = [0, 0, 2, 2, -2, -2, 0, 0]; [rad] steering wheel angle
pedal = [0.2, 0.2, 0.2, 0.2, 0.2, 0.2, 0.2, 0.2]; [-] normalized pedal position
speed = [v, v, v, v, v, v, v, v]; [m/s] reference speed
For your kindly information,
This is a simulation for electric vehicles.
There is no transmission involved.
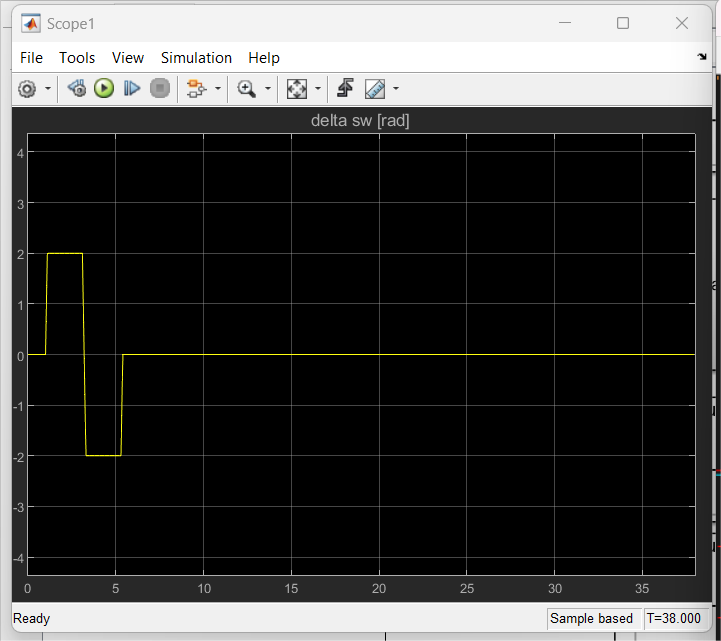
Please let me know if there is anything else needed. With this, I have also attached the graph output of the maneuver above based on the 8-DOF electric vehicle model in MATLAB.
This is the maneuver involved in MATLAB.
Good afternoon,
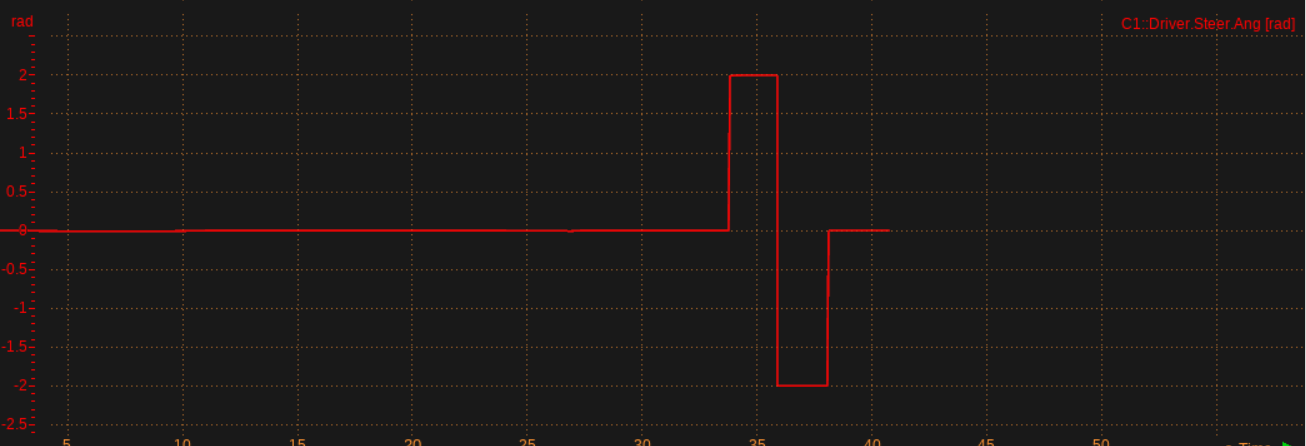
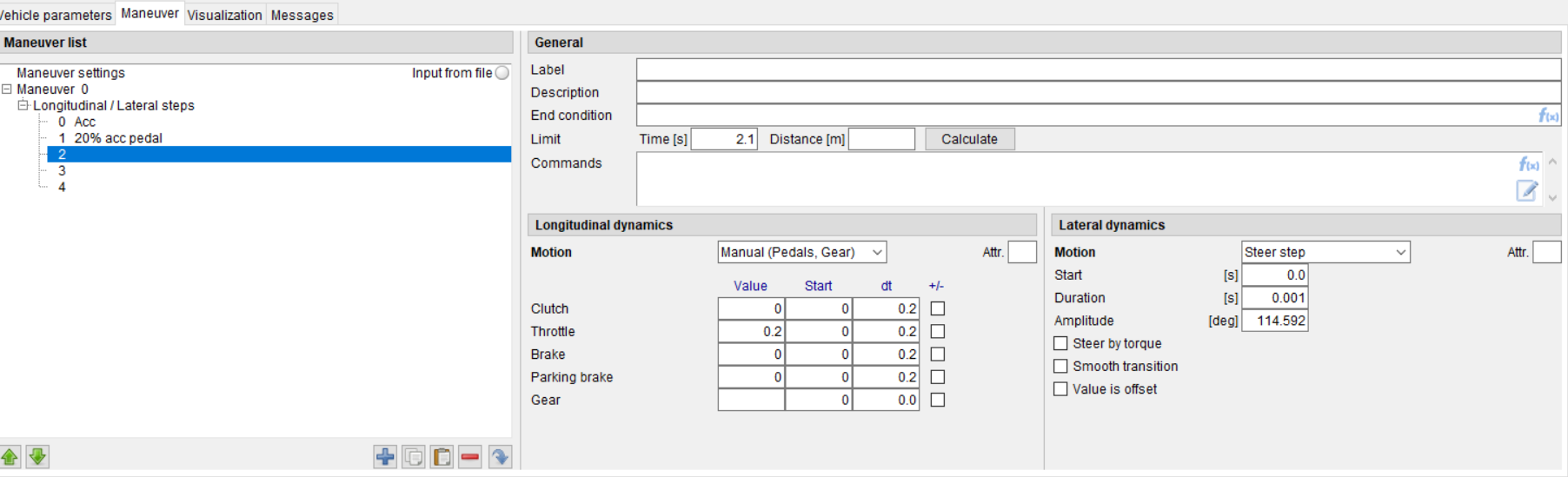
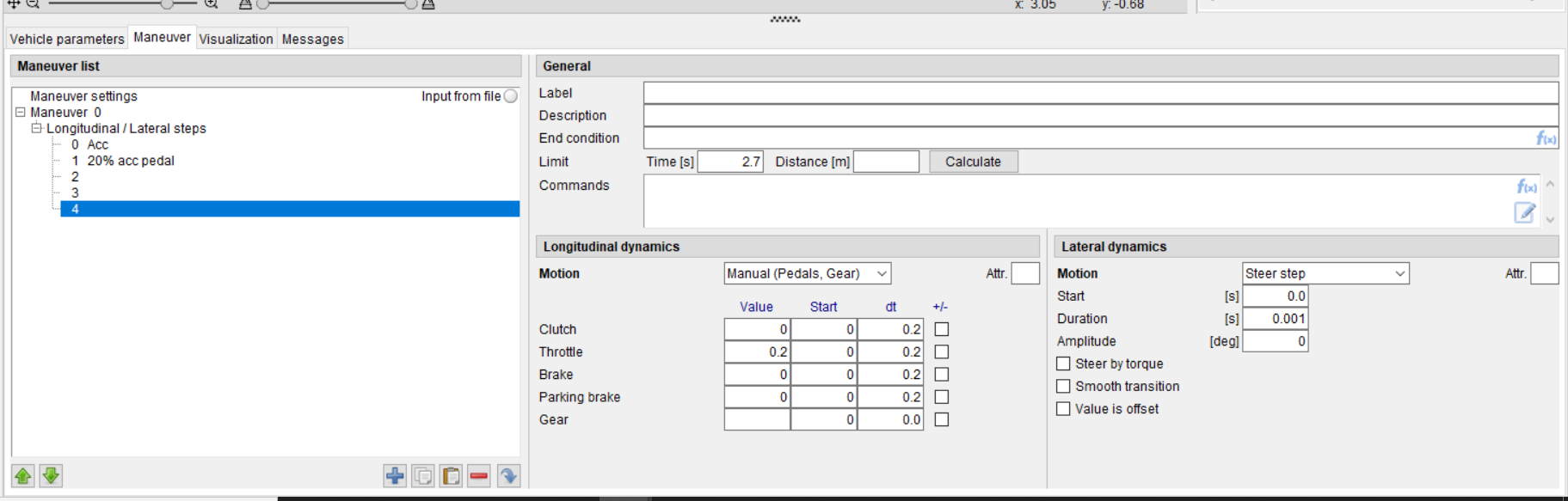
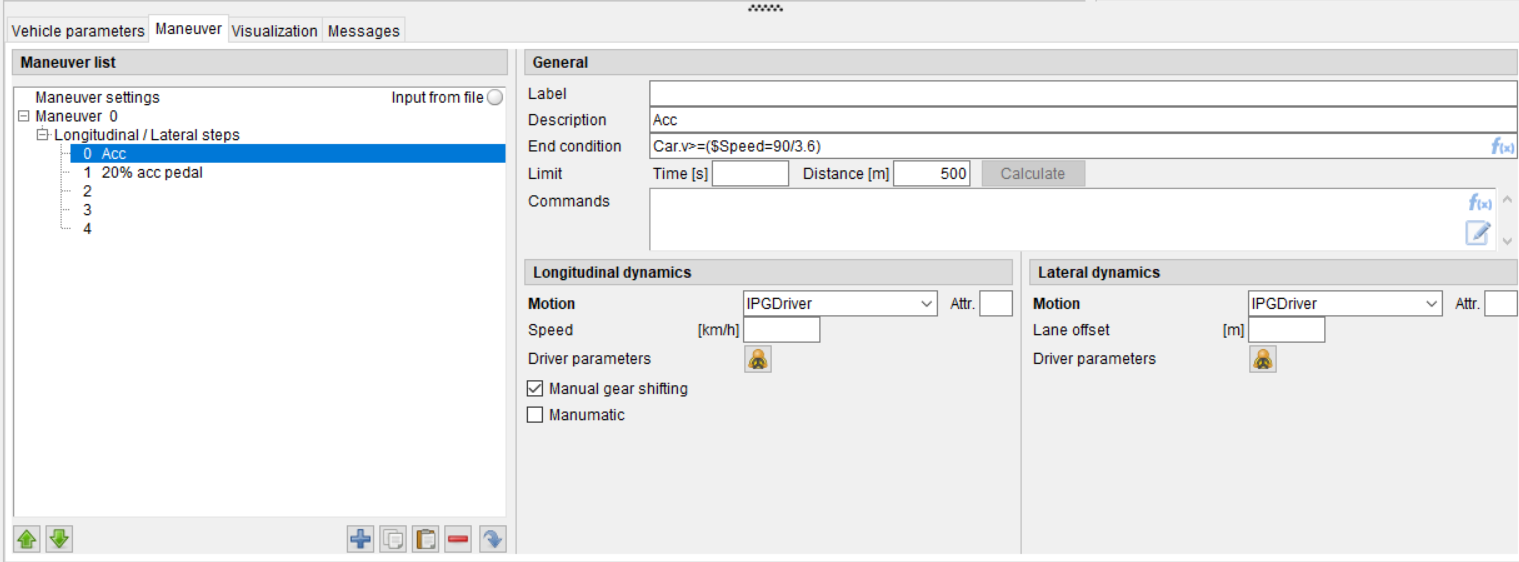
I did it with separate minimanouevre commands on the steering.
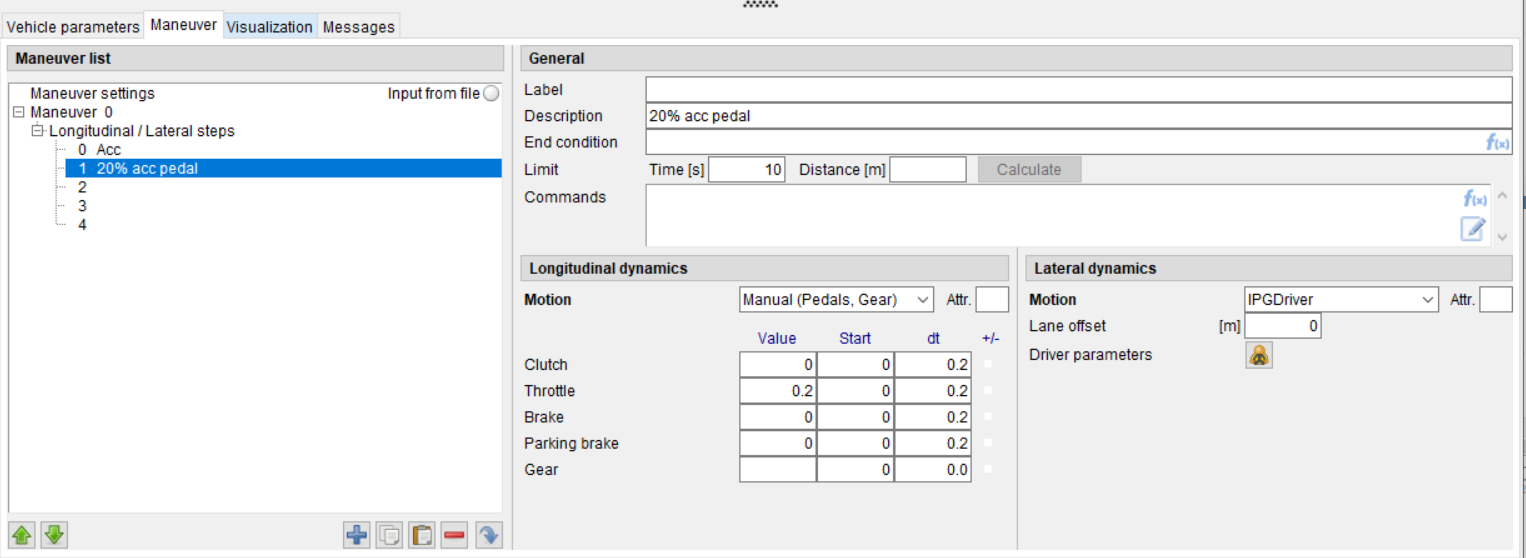
In my case I first launched the vehicle to 90kmh, then kept the accelerator pedal at 20%(then depending on the power of your vehicle this may result in different speeds of the manoeuvre if you chose another vehicle) and then executed the steer input to 2rad, -2rad and then 0rad
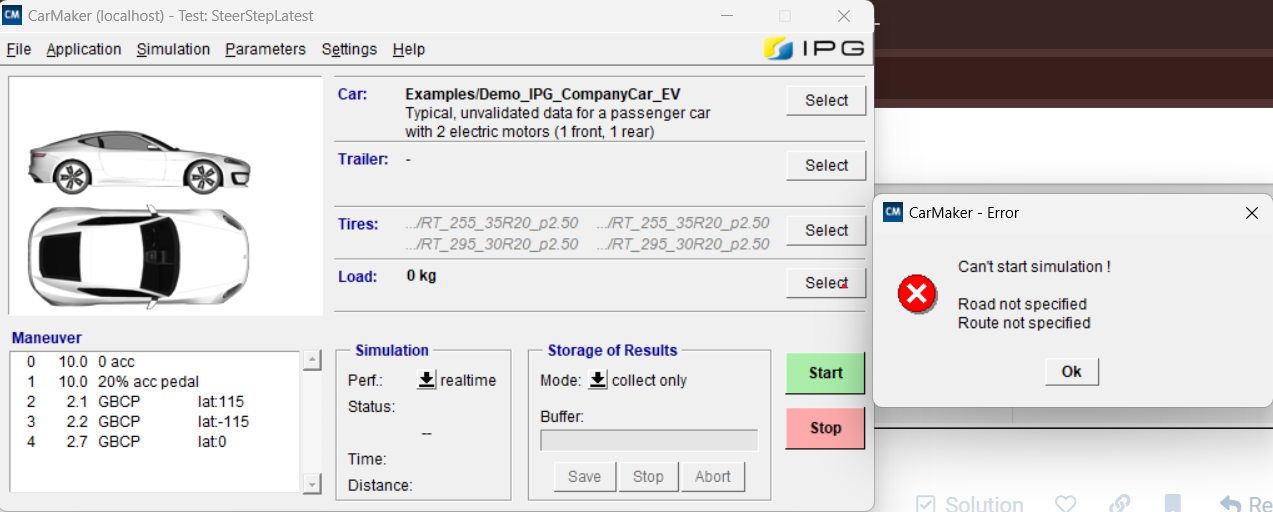
Great it looks the same as needed, but the difference is the lane changing for yours is at the end of the simulation. I have already specified the maneuver as above and am currently having trouble with the road and route specification. And also it would be good if you could share the first 2 maneuvers as well. Thank you
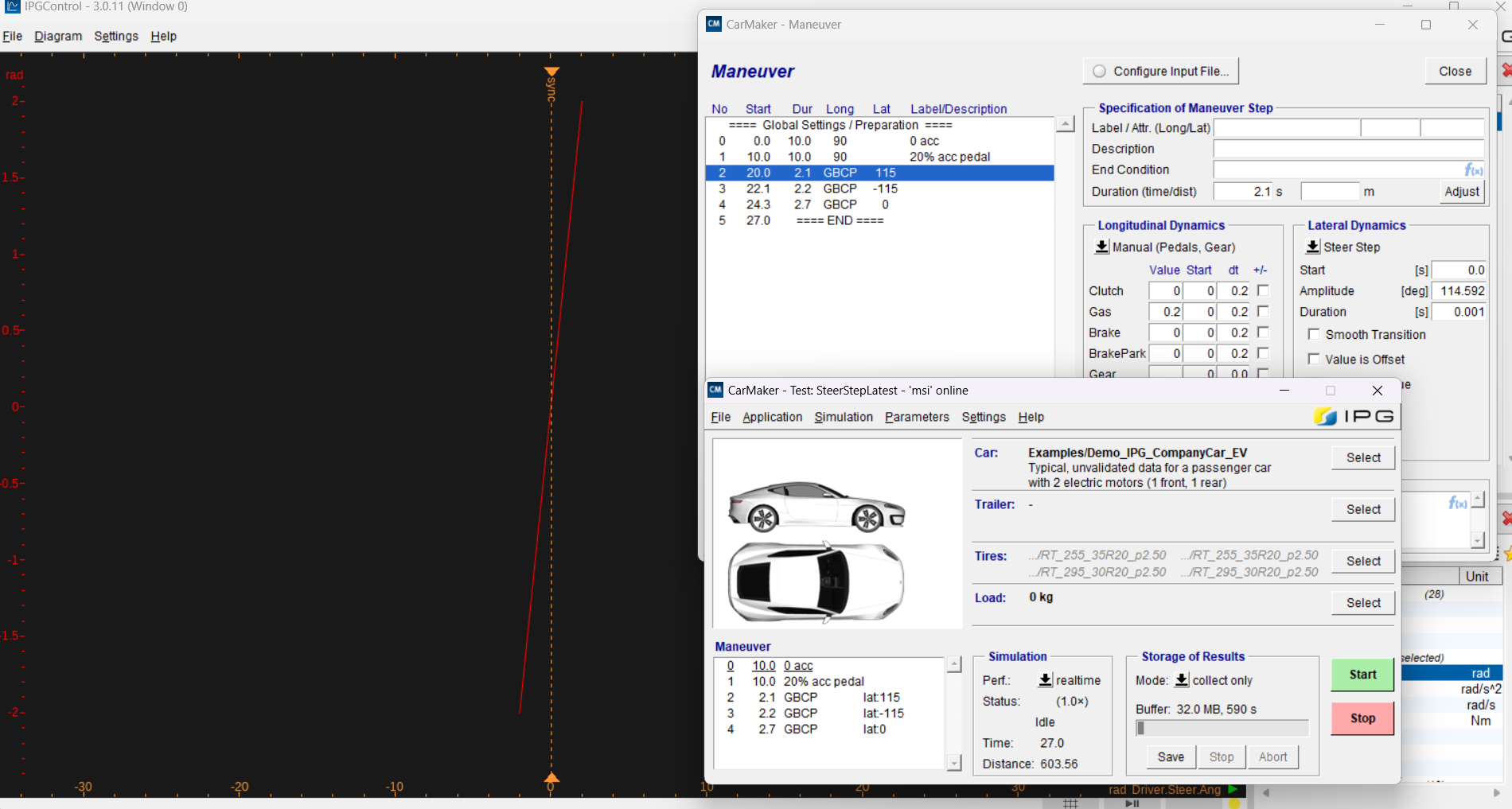
Good evening, after using a demo road and route this was the outcome, sir.
Good morning,
is not important if the manoeuvre is at the end or at the beginning of the simulation.
However is a typical lane change manoeuvre it does happen when the vehicle reaches a certain speed, this is what I have done in the initial part of the simulation.
Here below the first 2 steps of the simulation
To execute this manoeuvre I use an infinite plane that is also part of some CM examples
Plane.rd5 (1.6 KB)