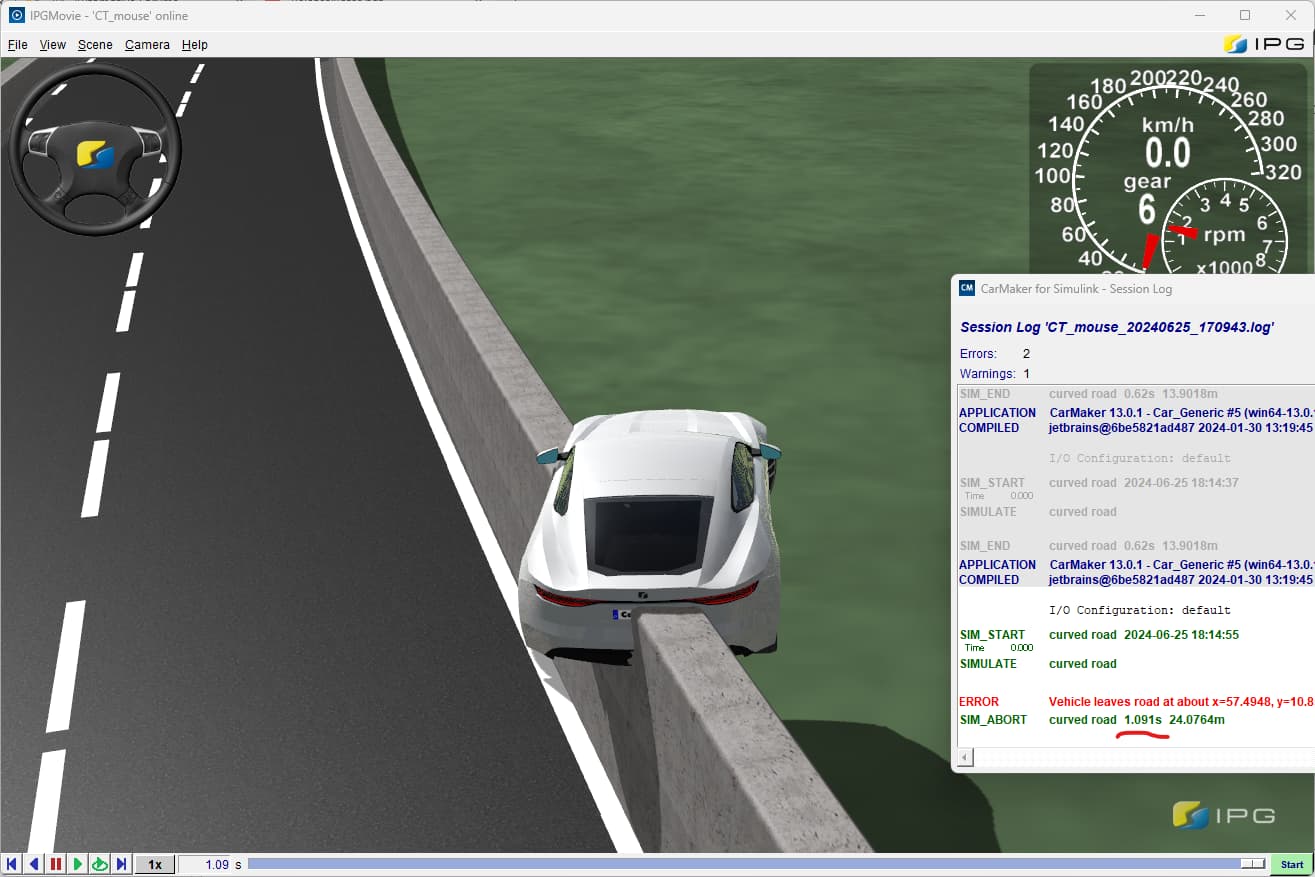
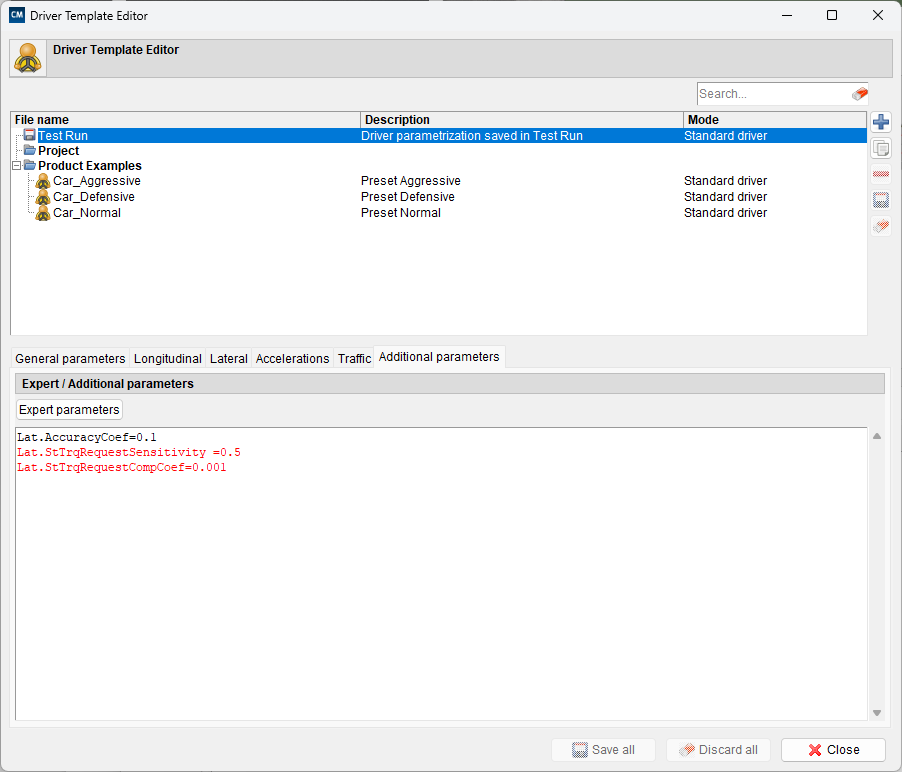
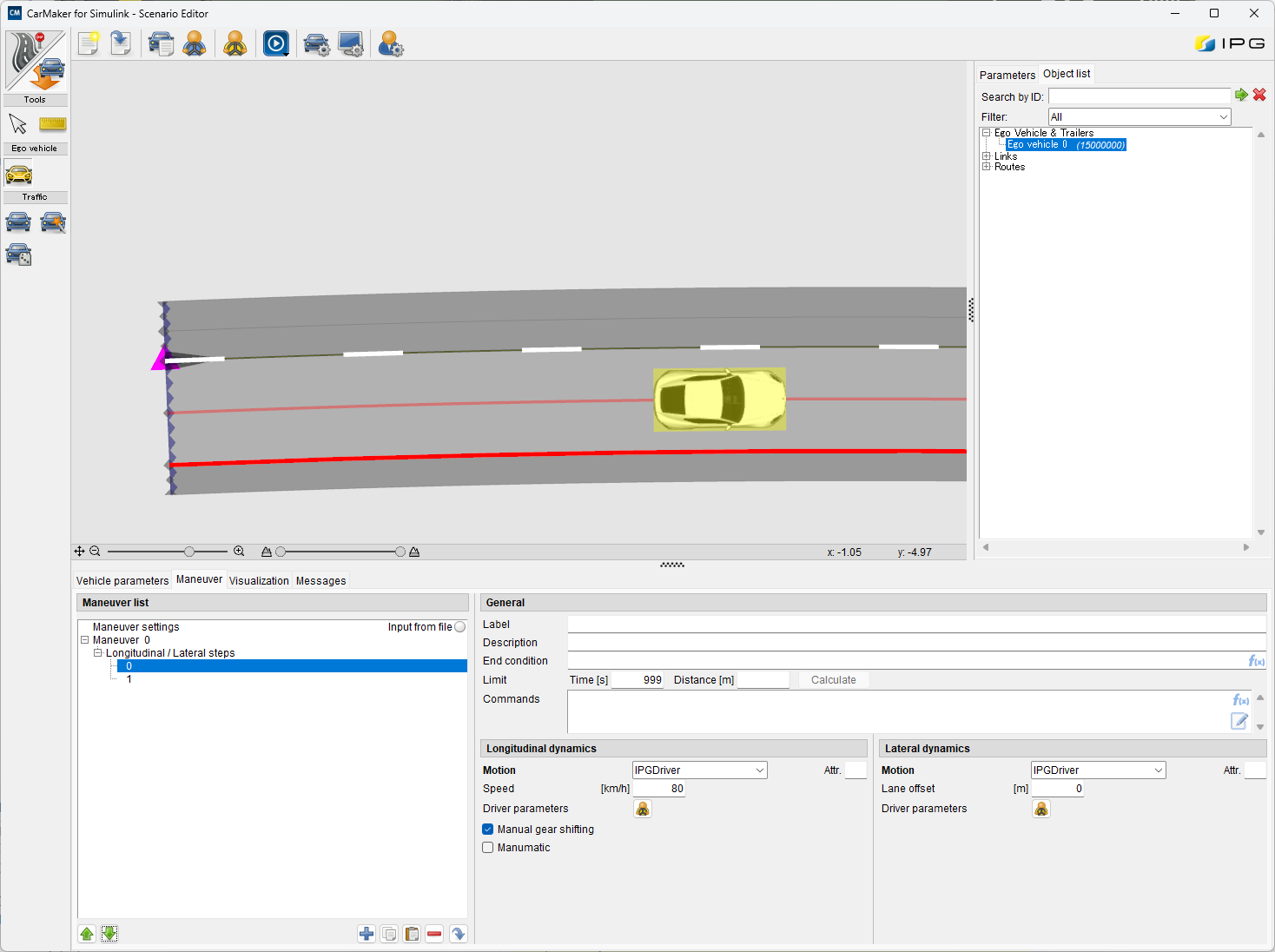
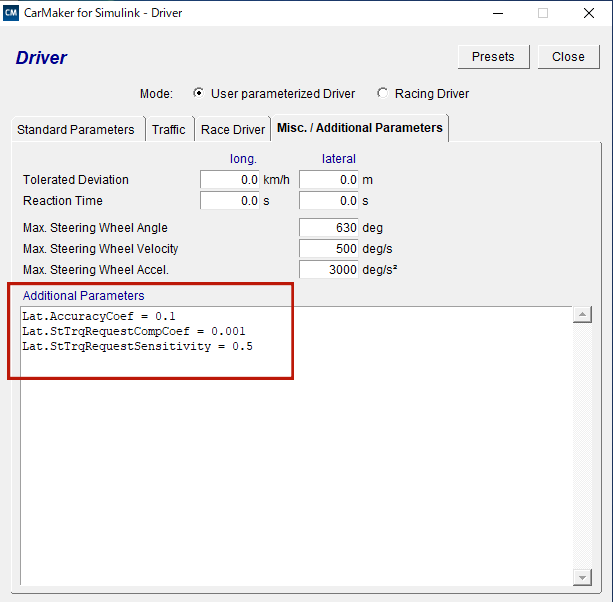
Hello, This is the scenario I set up: IPGDriver controls the vehicle’s lane change and an external steering wheel torque can intervene, so I set the parameters in the diagram. But this will cause the vehicle to run off the road as soon as the simulation starts.
The version of Carmaker I’m using is 13.0.1 and the font here is red, does that mean there’s something wrong with the parameters? I don’t recall this being a problem in the previous version.
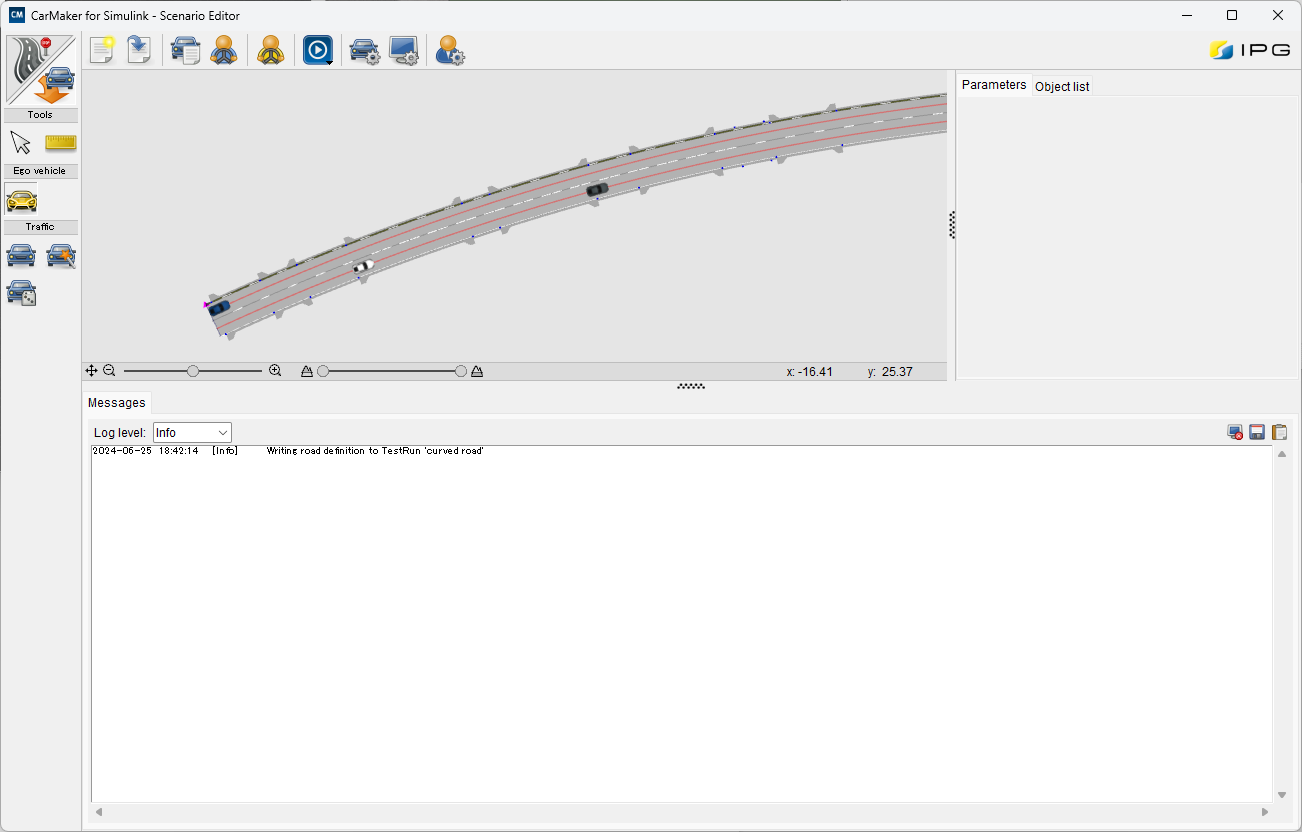
I now have the road set up to be curved, but if I use the above parameters when I set the road to be straight, the vehicle does not run off the road. This is very strange.
Best regards,
Wu
Good morning,
it may be that you set the steering wheel input at the first manoeuvre, as soon as the simulation starts then the vehicle will follow the external wheel torque you are giving as an input.
Ok, thanks for the reply.
Can you send me the test run?
With respect to your query.
The version of Carmaker I’m using is 13.0.1 and the font here is red, does that mean there’s something wrong with the parameters?
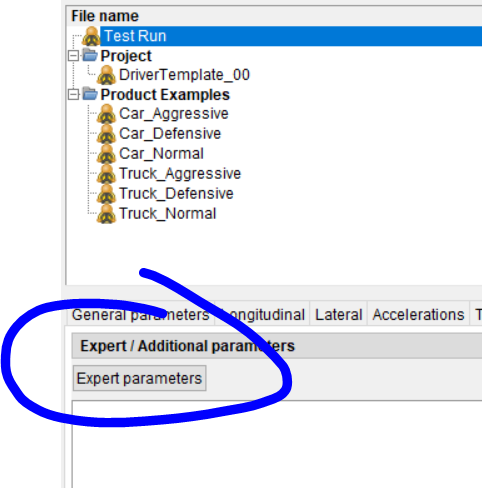
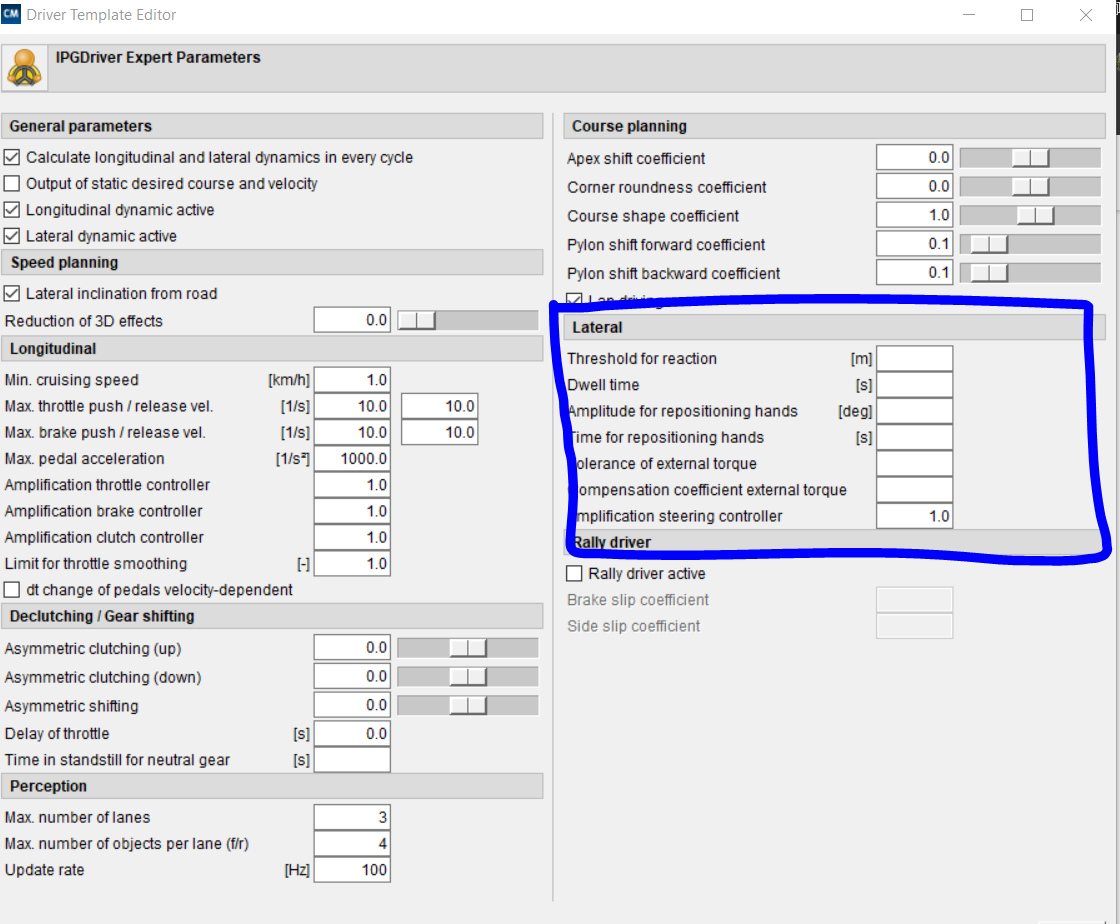
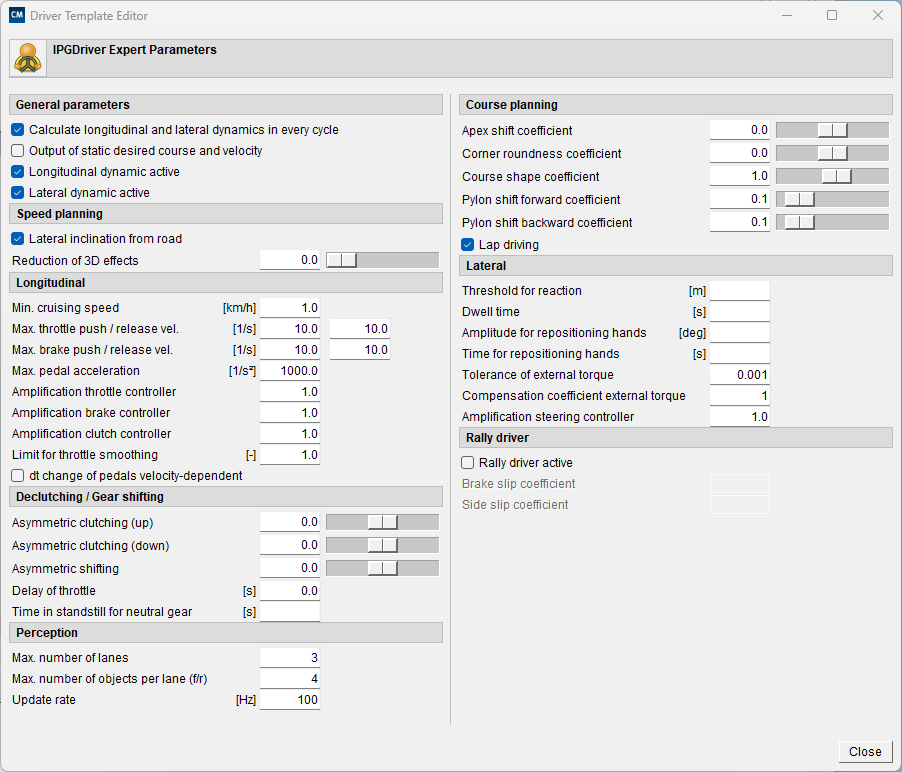
Yes, if it is red means that that parameter wrong or is set in the expert parameters section which is a new feature of CM13.
curved road.zip (3.7 KB)
Hello,
Here is the testrun I used.
You should check the IPG Driver manual under the help section.