Hi, how can I model an u-style anti roll bar in IPG Kinematics? I am using a double wishbone suspension. It is actuated by a linker attached to the rocker.
Thank you in advance ![]()
Hi, how can I model an u-style anti roll bar in IPG Kinematics? I am using a double wishbone suspension. It is actuated by a linker attached to the rocker.
Thank you in advance ![]()
To give a bit more context:
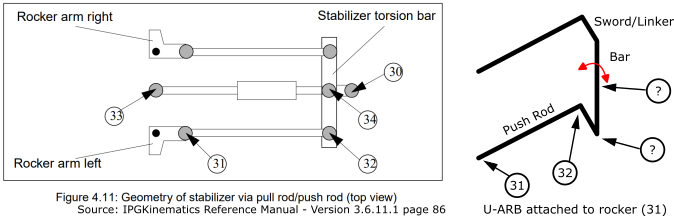
How are you guys assigning each number?
Thanks for your answers. ![]()