Hey,
So I am faced with the following problem: We generated a ACC controller, capable of lateral and longitudinal control. The controller output of the longitudinal control is the acceleration and I cant find any way to effectively write the acceleration in Carmaker/ Simulink. So my question is, is there any way to work around the usage of the gas and brake parameter? I just want to give an target acceleration to the IPG Driver but I only found the parameter for the target Driver speed.
Any help is very appreciated.
Hello,
As a start, I would recommend looking at two existing examples in CarMaker for Simulink provided by IPG.
Have a look at the CarMaker Programmer’s Guide documentation. There are sections like in the image below that discuss the ACC and the AccelCtrl_ACC examples. I think they will be very helpful.
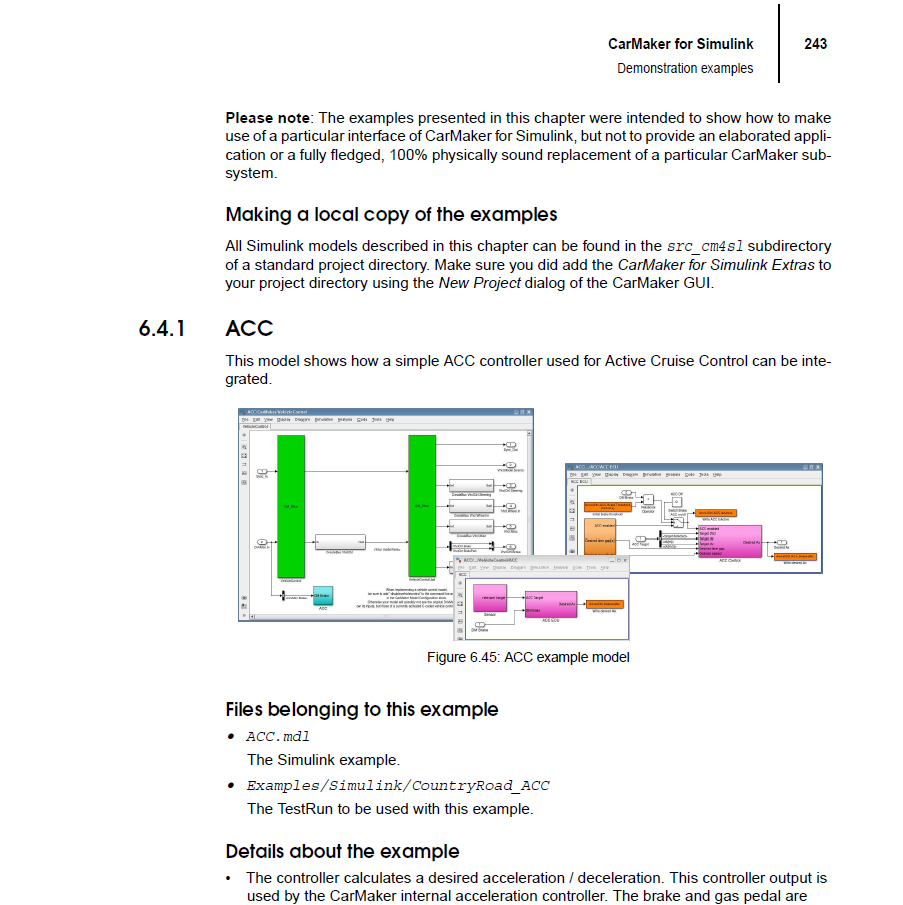
These examples operate by calculating a desired acceleration. Yes, the final manipulation is through the vehicle brake and gas, but they come out of a PID controller that takes acceleration as input. Something like that may be integrated in your ACC model as well.
Regards,
Bogomil