Hello everyone.
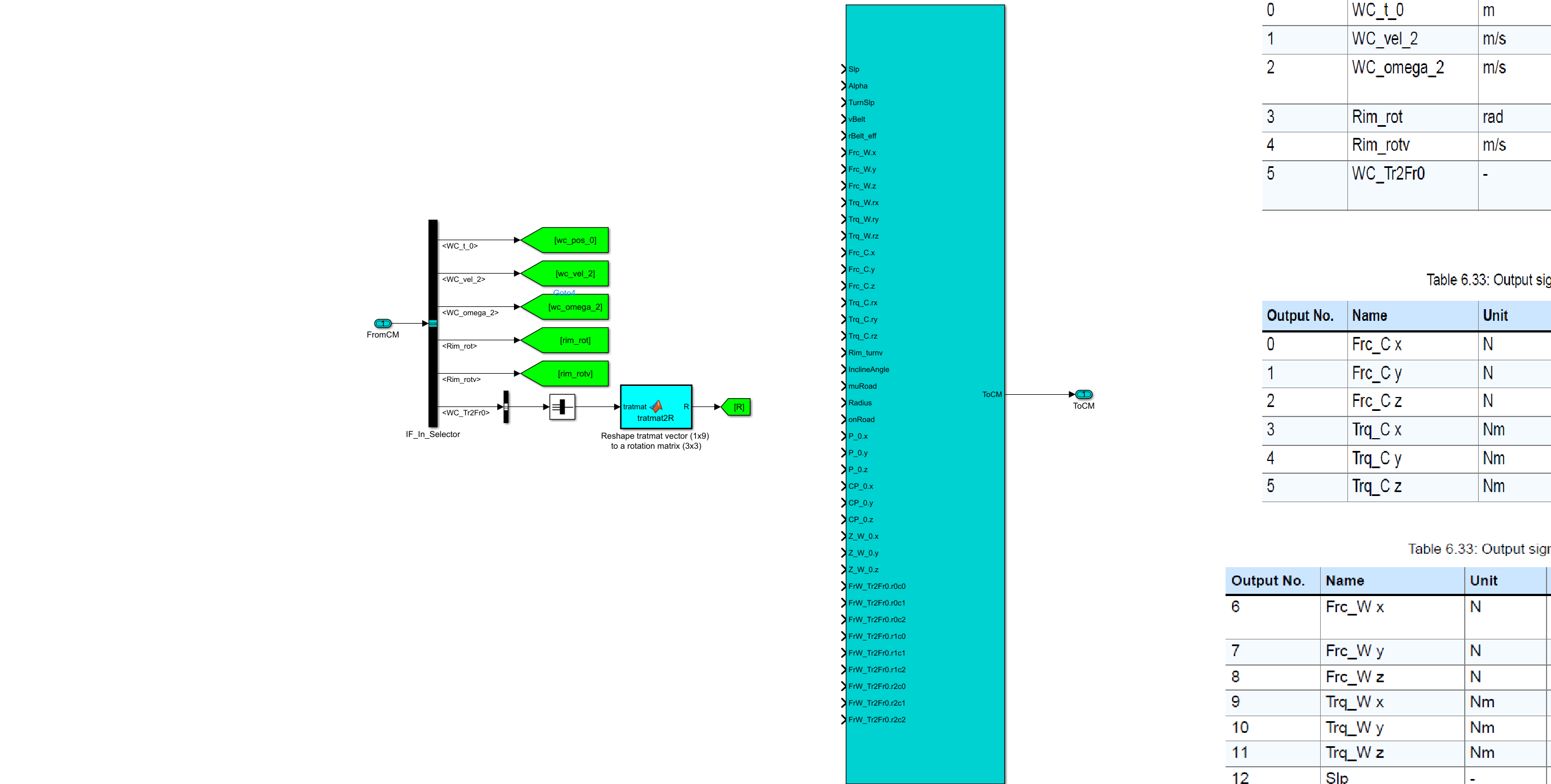
I am using IPG CarMaker (version 12.0.1) for creating a custom STI Tire plugin. In the reference manual and IPG documentations, I cannot find any detailed and step by step guide of how to create such plugin, use it as the tire model. There are various outputs findable in the simulink plugin interface which maked me wonder whether all of them are compulsory to be calculated by our tire model and are indeed needed for CarMaker or not? If not, which of them exactly are the required ones.
I also am hoping that after I have built a CarMaker executable find around my Tire STI simulink plugin, I can still import it in the CM4SL because I need to evaluate my controller’s performance using Simulink and running it in standalone CarMaker is not adequate for me. I guess the other way can potentially be building another plugin for my controller but I would prefere to run my custom Tire STI model in CM4SL.
Thanks in advance for your help.
Hi AHV1373,
Creating a Simulink Plugin and use it in CM4SL is possible but I don’t think it has sense in your case. You can use CM4SL straight away to create your model.
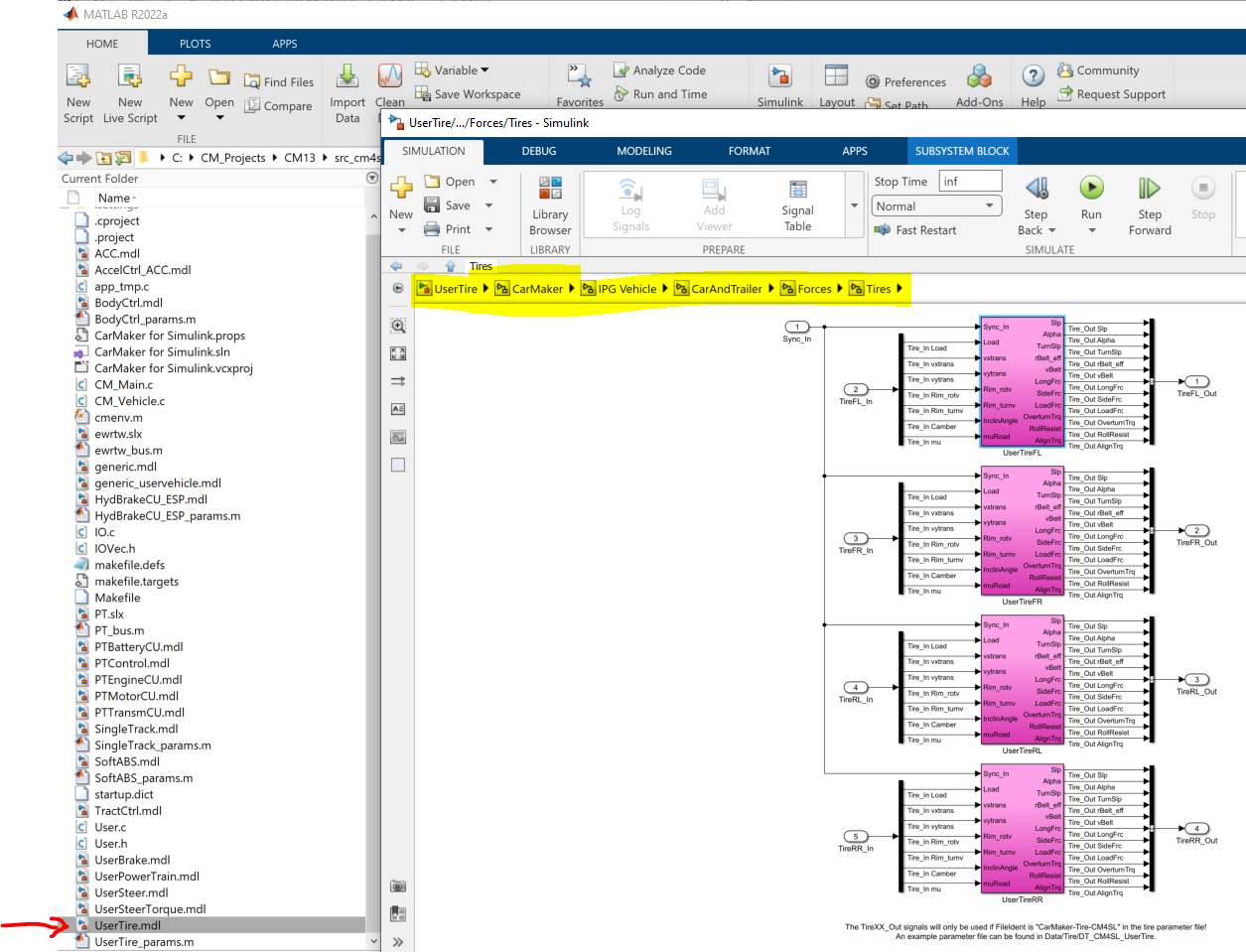
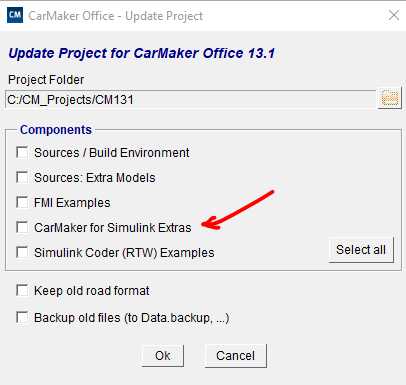
You can find an example of a User Tire in CM4SL in the src_cm4sl folder, which I think will be useful. To get those examples in your project you can select the “CarMaker for Simulink Extras” when you create the project or update it after.
Many thanks for your response @jose.nevado
I initially attempted to deploy my model in CM4SL based on the example provided by IPG. However, I realized that this interface is for CPI tire model while my Tire model is using STI tire interface, I have read the IPG documentations and noticed that unlike CPI tire models, STI tire models in CarMaker allow us to model the entire tire dynamics including the vertical tire dynamics, which is a capability that I need for my simulations.
To be more specific, I am trying to adopt IPG CarMaker for simulations in unstructured environments. I have a tire model designed explicitly for such conditions (based on STI interface) but when I implemented my model in CM4SL, I realized that when I feed the vertical forces predicted by my tire model to CM, the tire and hence, the vehicle, are not behaviouring as I expect them to do.
Therefore, I thought that I need to adopt Tire STI simulink plugin which will hopefully allow me to model the vertical tire dynamics as well.
To be honest, if it is possible to stick with MATLAB/Simulink and CM4SL, I would undoubtedly prefer to do so, but I am assuming that in CPI plugins (including the one that is available in CM4SL), CM still solves the vertical tire dynamics, not my tire model.
If I am wrong on this point, I would greatly appreciate some clarifications on how IPG handles the forces and moments that my custom model is feeding to it in its backend.