I would like to set an initial speed at the start of my simulation and configured it in the Global Settings of the Maneuver description. But for a start velocity of 100 km/h I can see a significant deviation in the early phase of my simulation. How can this be solved so that the start velocity remains constant?
The best way is to understand how CarMaker is working in this case:
- For the first simulation step at t=0s the vehicle speed is exactly at the specified speed. This is reached in the Preparation Phase before the actual simulation will begin.
- At the same time, the different driving resistances and mass intertias in the powertrain start to decelerate the vehicle. During the Preparation Phase, the speed of rotating elements remain zero and have to be accelerated.
- Since IPGDriver works similar to a PID-Controller, he only reacts once there is a difference (“error”) to the target speed.
- At the very start of the simulation DM.Gas is still zero. Due to the deviation, IPGDriver increases DM.Gas and the speed increases accordingly.
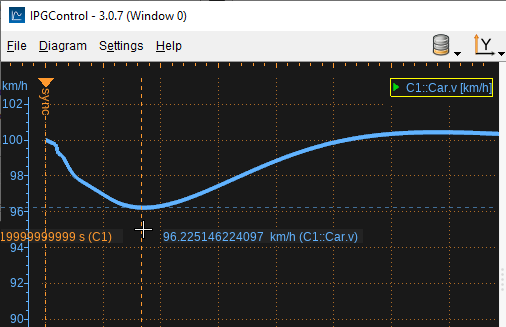
- The vehicle speed slightly oscillates around the target speed.
To avoid this discrepancy as good as possible, you have to consider some points:
-
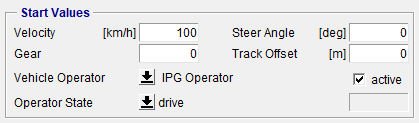
Check if you have set a suitable gear number for the start velocity. In the picture below, the gear number is zero, whereby IPGDriver and the GearBox has to shift in a suitable gear.
-
The best way to almost avoid this deviation and oscillation of vehicle speed is to manually set a “start value” for DM.Gas as well. Since this cannot be done using the global settings or the function “Determine Start Values”, RealTime Expressions have to be used. In the global maneuver commands write:
Time <= 0.001 ? DM.Gas = start value
The exact value needed for DM.Gas can be determined with IPGControl by checking which value for DM.Gas is reached after a few seconds of driving with the required constant speed.
https://ipg-automotive.com/support/client-area/faq/ticket/start-velocity-decreases-at-beginning-of-simulation/