Hello everyone,
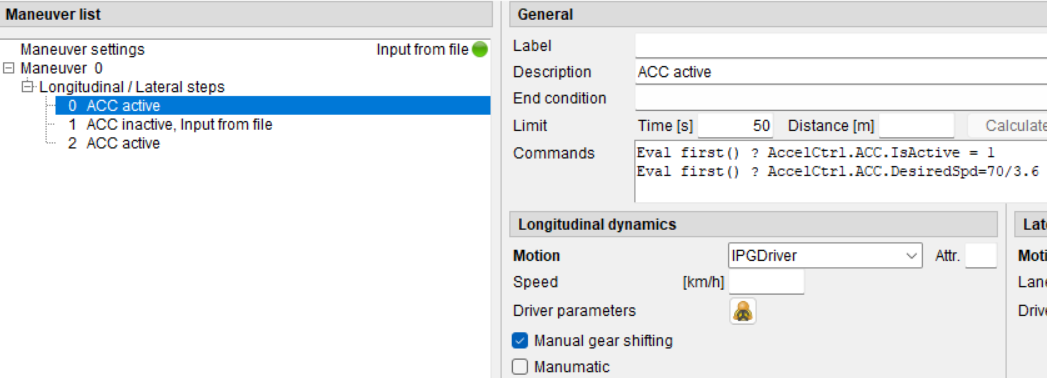
I am running a simulation in CarMaker with the following three-step maneuver:
- ACC Active – Motion controlled by IPGDriver
- ACC Inactive – Input from file, motion follows a speed profile
- ACC Active Again – Motion returns to IPGDriver
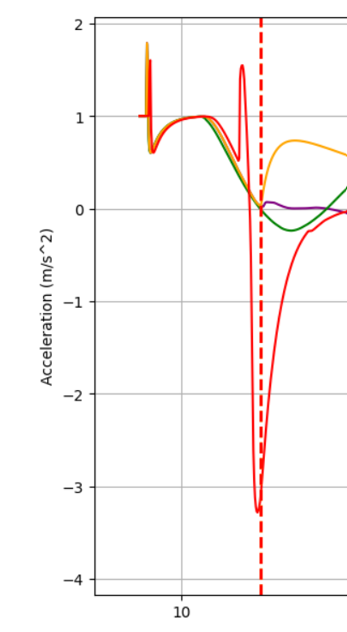
The issue I am facing is that when switching from step 2 (speed profile) to step 3 (IPGDriver), I experience significant acceleration and deceleration, leading to an abrupt transition.
Has anyone encountered a similar issue? Are there any best practices or settings to ensure a smooth transition when switching back to IPGDriver control?