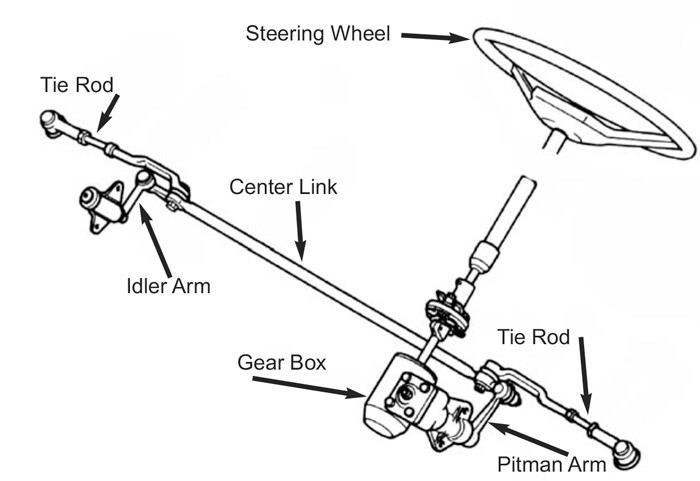
Hey! I am working in a university team named ITU Electric Vehicles. We are building an Electric Car for Shell Eco Marathon and we are not using rack pinion system for steering. We are working on Pitman Steering system. How can we find the angle for this system. Carmaker only allows us to use pinion system. How can we transform the pitman angle to pinion angle ? Thanks 
PITMAN SYSTEM;
Hi bbchan,
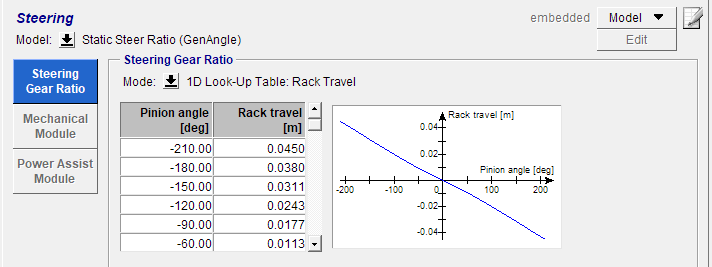
My suggestion for this would be to use the Static Steer Ratio (GenAngle) model with a 1D Look-up Table for Rack Travel, but instead of having rack travel, think about it in terms of Pitman arm lateral motion.
If the Pitman arm longitudinal motion is a significant effect for this model, then the approach I would take would be to use a .skc file for the front suspension and modify the steering rows to give you the same road wheel angles vs steering wheel angle as the real vehicle.
Regards,
Tim