This is an edited version of my post from yesterday.
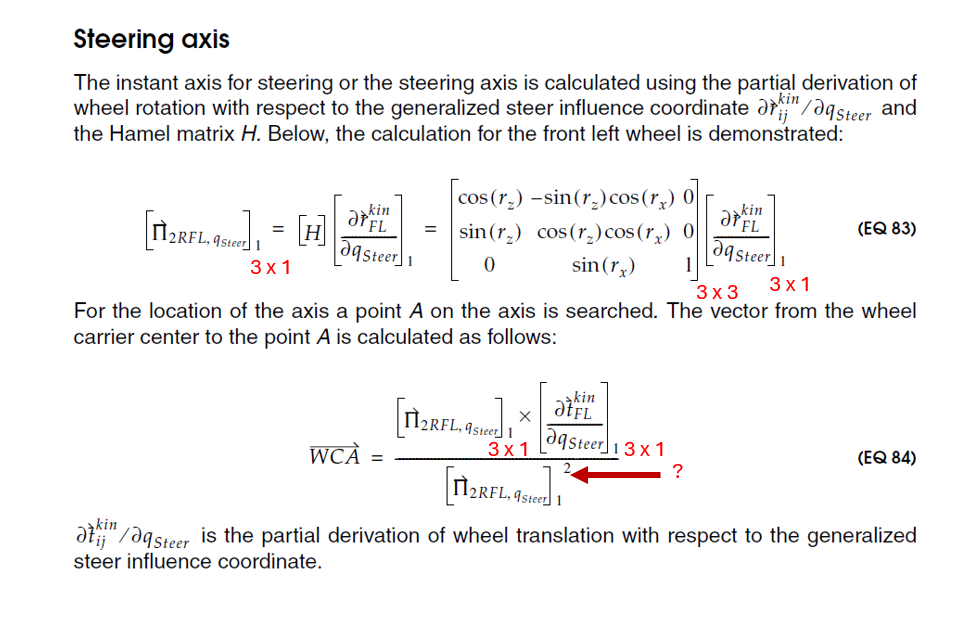
I have trouble with understanding (EQ 84) of the reference manual (version 13).
What is the meaning of power 2 in the denominator?
How to calculate the numerator to get a vector in the numerator?
Vector pi seems to be 3 by 1; it gets multiplied by another 3 by 1 vector of generalized steering states and then divided by the square of pi again. Could anyone clarify for me please?
Thanks!