I’m the Vehicle Dynamics lead for the Newcastle University Formula Student Team, and am using the base configuration from the Formula CarMaker package which most closely represents our vehicle, which is no aero, torsen diff, naturally aspirated ICE.
If running the simulation after basic driver adaption the vehicle will follow the track well enough, but not particularly fast. Looking at the simulation during race driver adaption shows several cones being hit, and if simulating after race driver adaption it leaves the track completely.
The LTS documentation says that corner cutting coefficient, along with the acceleration, braking and lateral time previews in the driver knowledge editor have a large impact on the driver’s ability to follow the route, so I’ve tried changing these in different combinations but can’t find anything which consistently keeps the driver on the track.
Any help on what I should be looking at to improve the reliability of the vehicle would be appreciated, as I ideally want to be able to find the fastest time the basic pre-set can achieve and then change individual parameters to see how they affect the lap-time, but I just don’t understand how running an adaption designed to make the driver better at the course causes them to hit cones and leave it entirely.
Thanks
Hello @t.anderson13 ,
I had the same problem at the past. I deleted the race driver that I had and created a new one with new knowledge. I have the learning rate at 0.75, the throttle smoothing at 0 and the corner cutting coef at 0.5 and it works pretty well. For the speed that the car is going look at the slip map and the ax,ay that the vehicle can reach. If it works late me now
Hi @fcm.user_26, thanks for the reply.
After using your advice the vehicle still hits a couple of cones but it performs far better than it was before so thank you for the help.
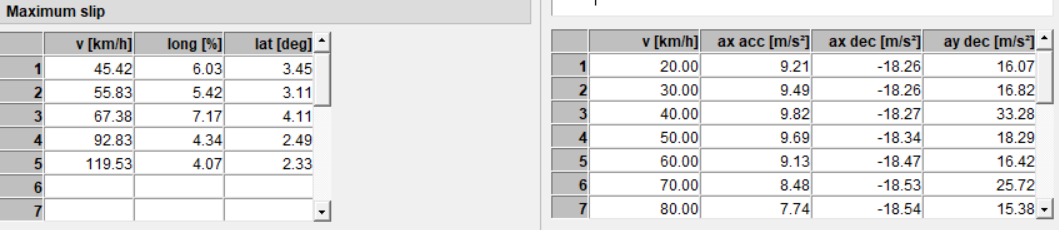
I’m attaching an image of my slip map and ax, ay table so you can see what values I get because I’m not sure what you meant by looking at them, I don’t know what it is I’m looking for.
Hello @t.anderson13 ,
From the values that i can see in the table, there are some wrong numbers. For example it is not possible to have at v=30 km/h ay=16.82 m/s^2 and the suddenly at v=40km/h it is ay=33.28m/s^2 and then it drops again at 50km/h at ay=18.29. The values should be getting higher with a normal rate. Those jumps at values are not normal. If you make a new driver and you train it again it generates that same values? You can change the values manually. Try putting some logical values at the table and watch how the drivers does. Now for the the line that the driver takes. Does he go completely of the track or it just cuts some corners and goes wide at the exits?
Hello @fcm.user_26 ,
Doing a new driver and training again did come out with the same results, but manually changing the ay values to have a smoother incline without spikes at certain speeds made it so the vehicle completed the course, staying in the track and not hitting any cones. I’m not sure why the adaption causes such a strange generation of lateral accelerations, but I’m glad to have a strategy which works now so thank you for the help.
Hi @t.anderson13,
The generation of these bad values at ax and ay might be due to the tire model that you are using. Also take a look at the parameters of your vehicle, it might be there something that generates this problem. Also a random question, what kinematics model do you use? skc, linear 2 DOF etc. I need some help with my model and i was wondering if you could give me some help.