Hi,
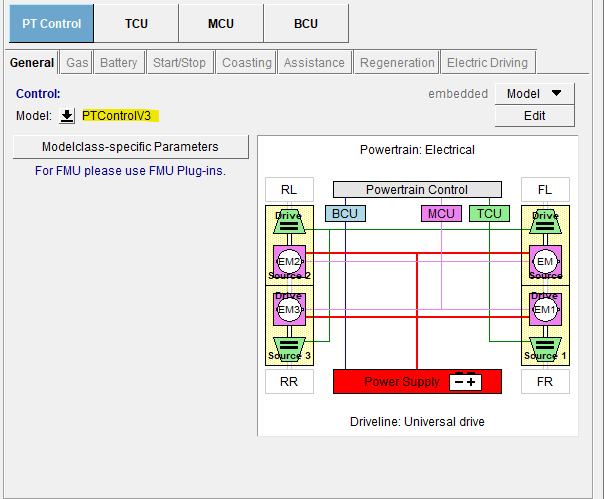
I am trying to use a custom Simulink model to control a 4WD electric powertrain. I have created a plug-in model in simulink and added it in Powertrain>Control Unit>PT Control.
I am planning on using this model to control the motors, and implement functions such as TV and TC, but using CM GUI to set the other car variables.
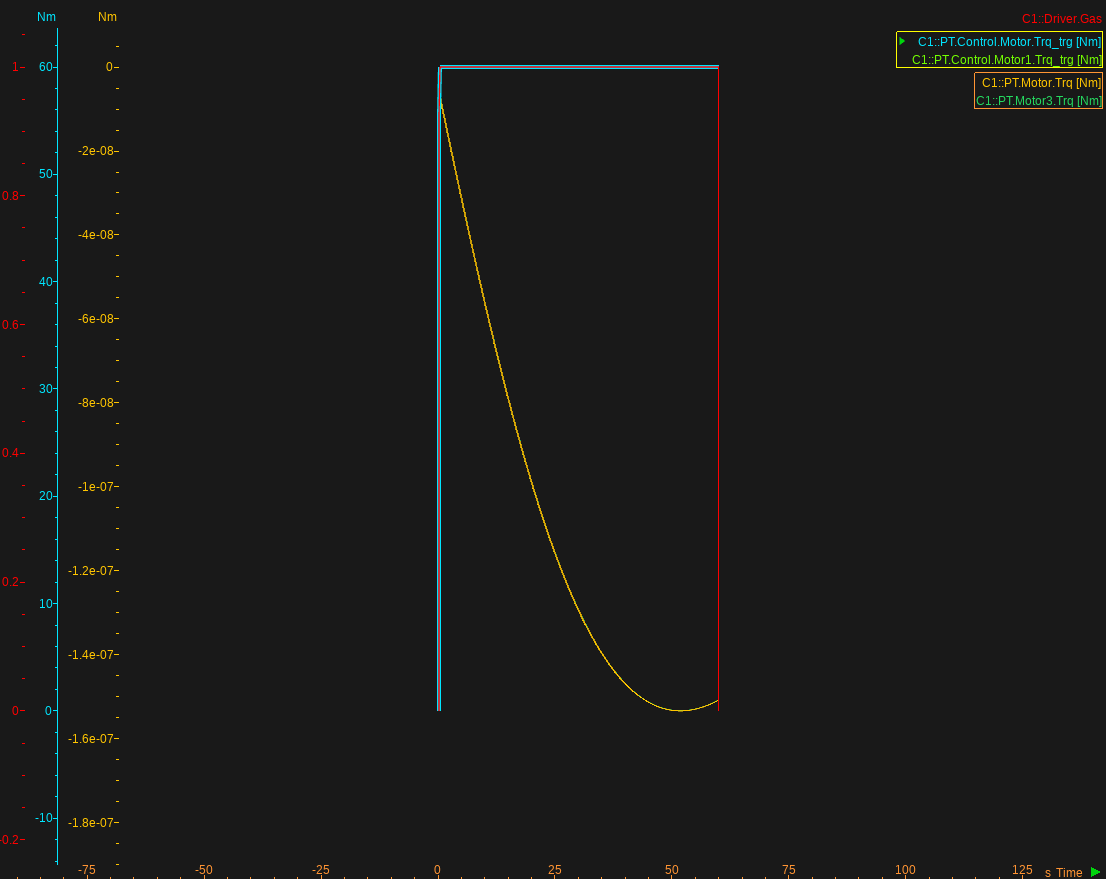
I am just trying to use a simple model to test the functionality and have mapped the gas signal to create a torque request, which is the variable that is being outputted from the model. The problem I am having is that the motor torque does not actually change based on this value and remains at ~0. I can see that the target is set correct.
I have also set the operation state to 4 in the simulink model since I getting errors before that.
Any help is welcome!