Hello dear IPG Forum members,
I am doing research related to vehicle motion control.
While using CarMaker, we consider the yaw rate value as a measurable value as the state value of the vehicle, and use it by loading the Car.YawRate value as a Dict in Simulink with UAQ.
I am working in the CM4SL environment and checked in CarMaker->IPG Vehicle->CarAndTrailer->Trailer->CreateBus.Vhcl.Motion.
I checked it as shown in the figure below.
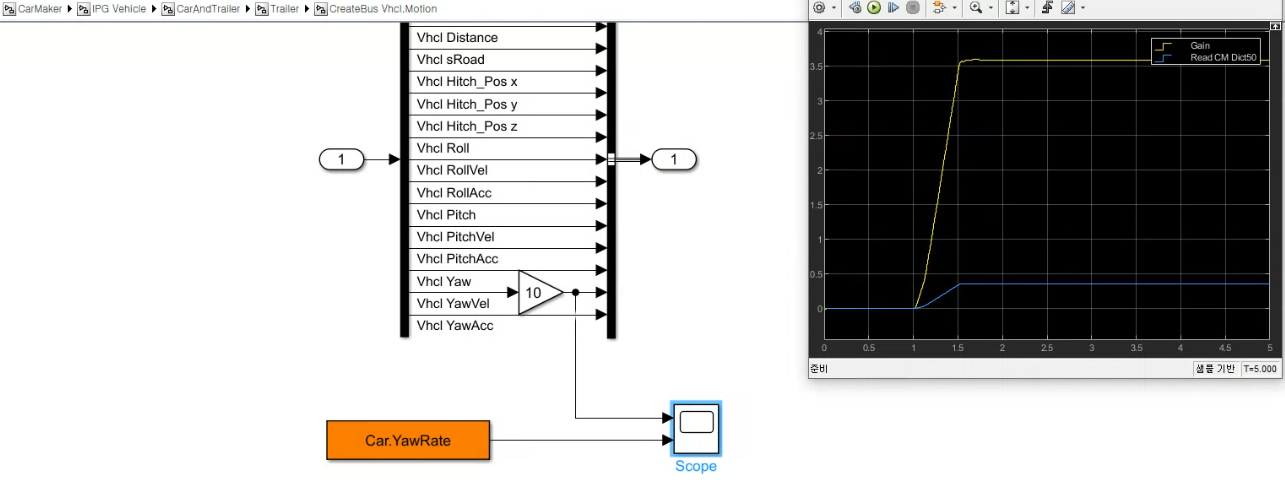
Blue line: Car.Yawrate;
Yellow line: Vhcl Yawvel * 10;
When the value of Vhcl YawVel and UAQ: Car.YawRate is 1, the same value is output. Therefore, I understood that the two values are the same value. (Variable values that are determined to be the same value in the process)
However, when I multiply it by 10 with an arbitrary Gain and output it, the UAQ:Car.Yawrate value is not output as a value multiplied by 10 in the scope.
It seems like a simple error, but I am a bit confused. [Reference Manual] I can’t seem to find it, so I haven’t used CM for that long, so please understand that I’m a beginner.
I’ll tell you my situation as above. Is there an angel who can help me?