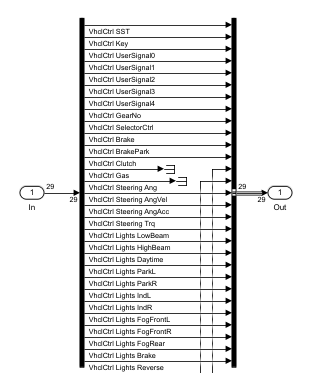
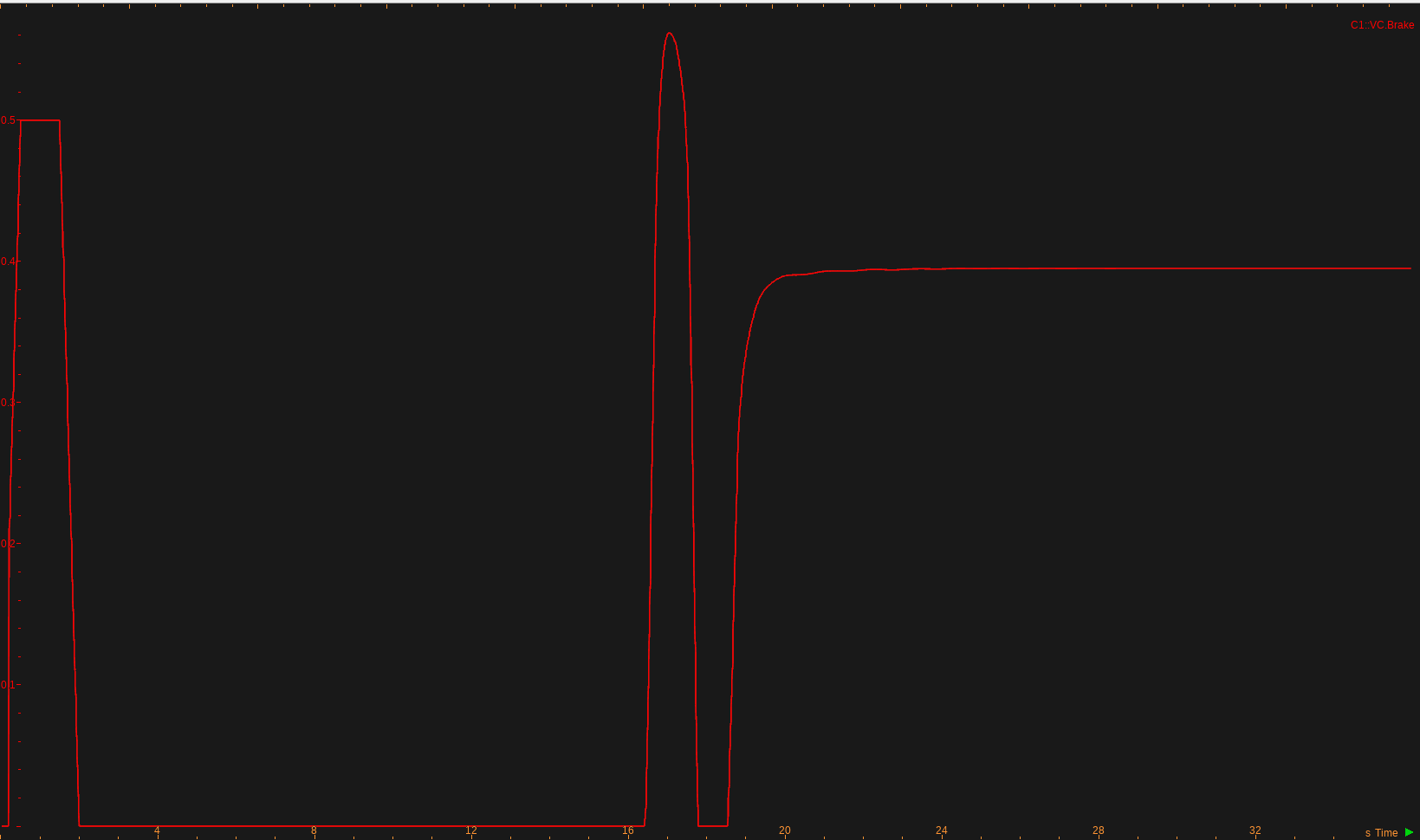
I am confuse about how the control from Simulink side works. As it can be seen that only Vehicle Gas and Steering Angle signal are coming from MPC controller other signals remains unchanged. My confusion is that when i run the simulation, the plant is running fine in CarMaker but it seems the VC.Brake signal is also applied to “help” the MPC controller.
Is Brake signal coming from IPG Driver? When yes, how to block the influence of IPG Driver? or we should not do anything with Brake signal?
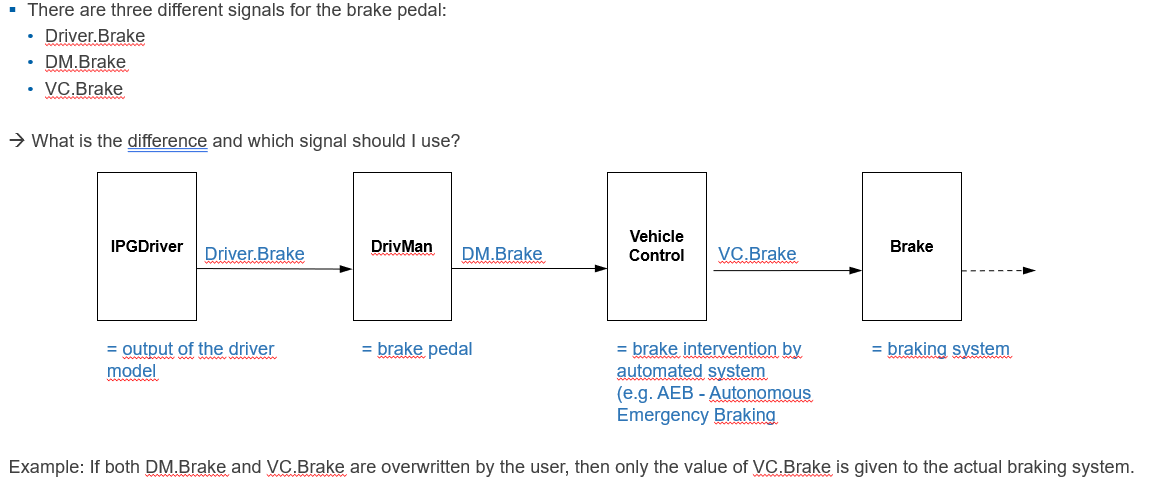
I am unable to write both DM and VC signals at the same time. However, I am wondering, is there any method to disable IPG driver completely to stop it from intervening.