I’m having issues enabling the LiDAR for the provided CarMaker FS autonomous package. I’m using CarMaker 13.0.1 on Ubuntu 22.04, with an NVIDIA GeForce GTX 1660 Ti, however the same issue is noted on other systems within my team. We have been able to run formula carmaker with the LiDAR disabled in the sensor mountings tab for the ADS-DV (and see data from the cameras), however when the LiDAR is enabled we get the error:
A2:127.0.0.1.2 registered
A3:127.0.0.1.3 registered
SIM_START FS_autonomous_TrackDrive 2025-01-22 13:14:18
Time 3.765
CarMaker ROS Node enabled: Mode = 1, SyncMode = 0
-> Node Name = cm_node
-> Publish /clock every 100ms
-> Sending service request
CMJob: CyclicJob -> Name=cm2ext Cycle=15000 Offset=0
Time 0.002
Beam table read successfully. Table consists of 15000 rows
FOVh = 0.000000, FOVv = 0.000000, nBeams_h = 300.000000, nBeams_v = 50.000000
Beam Table --> First Azimuth Element = -59.800000
Beam Table --> First Elevation Element = -4.900000
CMJob: CyclicJob -> Name=pointcloud Cycle=10 Offset=0
CMJob: CyclicJob -> Name=ObjectList Cycle=10 Offset=0
CMJob: CyclicJob -> Name=Camera Cycle=100 Offset=0
CMJob: TriggerJob -> Name=VehicleControl Cycle=1 Offset=0
CMJob: TriggerJob -> Name=ext2cm Cycle=10000 Offset=0
ERROR GPUSensor: Instance 1 has not registered with the SimProg
ERROR SensorCluster: Could not get GPUSensor ID Mapping.
SIM_ABORT FS_autonomous_TrackDrive 0s 0m
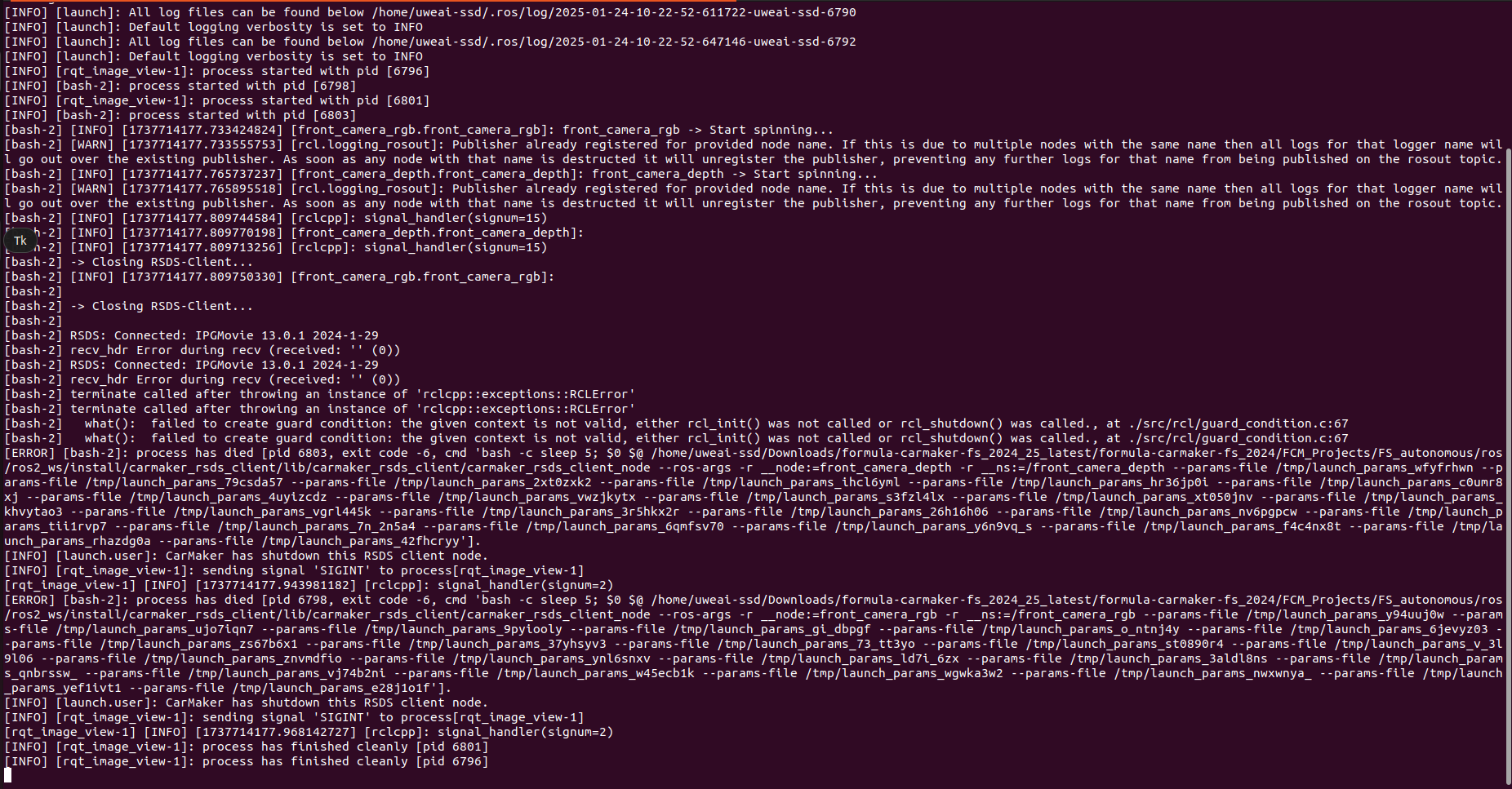
If we run the LiDAR instead using MovieNX (other camera sensors still on IPGMovie) we get the error:
A2:127.0.0.1.1 registered
A3:127.0.0.1.2 registered
A4:127.0.1.1.128 registered
SIM_START FS_autonomous_TrackDrive 2025-01-22 13:19:32
Time 0.004
CarMaker ROS Node enabled: Mode = 1, SyncMode = 0
-> Node Name = cm_node
-> Publish /clock every 100ms
-> Sending service request
CMJob: CyclicJob -> Name=cm2ext Cycle=15000 Offset=0
Beam table read successfully. Table consists of 15000 rows
FOVh = 0.000000, FOVv = 0.000000, nBeams_h = 300.000000, nBeams_v = 50.000000
Beam Table --> First Azimuth Element = -59.800000
Beam Table --> First Elevation Element = -4.900000
CMJob: CyclicJob -> Name=pointcloud Cycle=10 Offset=0
CMJob: CyclicJob -> Name=ObjectList Cycle=10 Offset=0
CMJob: CyclicJob -> Name=Camera Cycle=100 Offset=0
CMJob: TriggerJob -> Name=VehicleControl Cycle=1 Offset=0
CMJob: TriggerJob -> Name=ext2cm Cycle=10000 Offset=0
-> Advertised and subscribed topics (14):
-> /carmaker/Camera
-> /carmaker/ObjectList
-> /carmaker/VehicleControl
-> /carmaker/cm2ext
-> /carmaker/pointcloud
-> /clicked_point
-> /clock
-> /goal_pose
-> /hellocm/ext2cm
-> /initialpose
-> /parameter_events
-> /rosout
-> /tf
-> /tf_static
Current random seed value = 1737551972
Time 0.000
SIMULATE FS_autonomous_TrackDrive
WARNING CameraRSI: VDS client not running on simulation start. (-60)
WARNING CameraRSI: VDS client not running on simulation start. (-60)
ERROR LidarRSI: Error cudaGraphicsGLRegisterImage returned 999, unknown error (-1)
ERROR LidarRSI: Cuda Error after synchronization (-1)
SIM_ABORT FS_autonomous_TrackDrive 0.021s 2.91854e-08m
I have confirmed nvidia drivers are installed: “Driver Version: 565.57.01”
I have confirmed cuda is installed: 12.1
*all tests were carried out using downloaded (22/01/25) and built formula carmaker autonomous package with no modifications
Any help on this would be appreciated.
Kind regards,
Isaac