I’ve been trying to model the front suspension in Kinematics for a Forces Off simulation.
I’ve been having trouble since the lSpring, lDamp, lBuf, lStabi values are not decreasing at all.
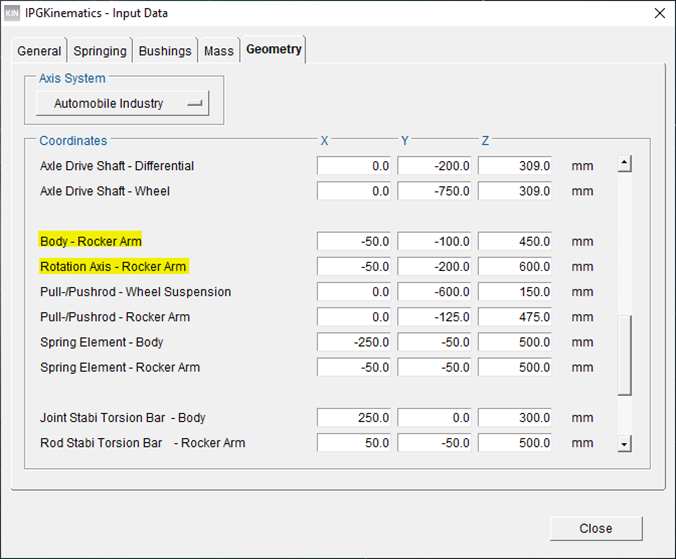
After a bit of searching i believe there is an issue with my geometry concerning the values of the Rocker Arm since we don’t use a usual Rocker arm design. I have checked my simulation settings.
I think that the problem is that the program doesn’t understand how the Rocker Arm is rotating in reference with the spring assembly and the pull rod.
I don’t know how to tackle this issue.
It is difficult to see on the picture, but from your description it sounds like you have set up the axis of rotation of the Rocker Arm incorrectly.
One should expect the pull/push rod, the rocker arm and the spring element to be all roughly in the same plane. The rocker arm axis should point roughly in the same direction as the normal plane formed by the pull/push rod and the spring element. In figure 4.7 below this plane is the y-z-plane, therefore a valid axis of rotation should mostly point in the x-direction.
In the default template of the double wishbone suspension, one can see that the axis of rotation of the rocker arm points on the y-z direction.
In the geometrical window, therefore, the normal plane formed by the pull/push rod and the spring element roghtly point on the y-z direction.
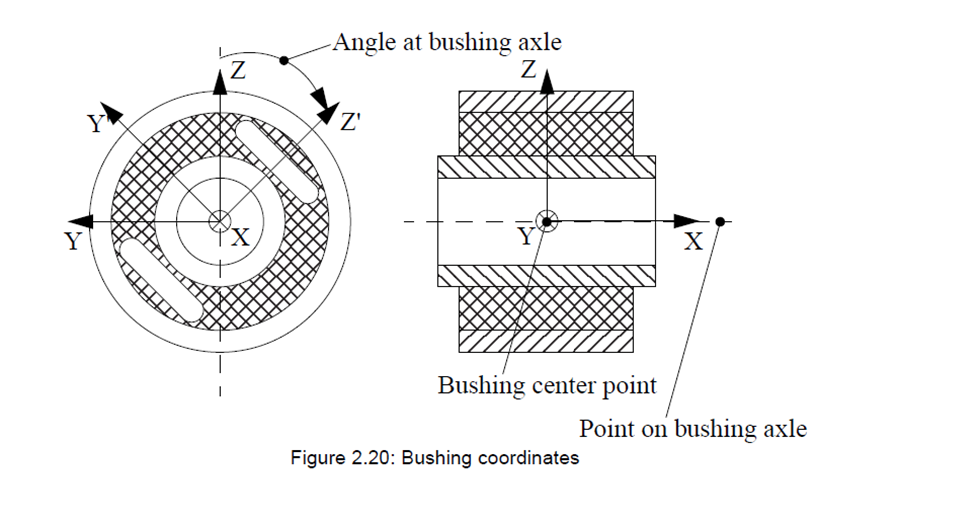
In a similar spirit, it is good practice to pametrize the bushing axis in such a way that it alings with the expected direction of rotation of the element connected to it. Depending on the configuration, if the axis of rotation and the expected direction of rotation of the element connected to the bushing are not aling, could lead to errors.
Thank you for your reply.
I found out what was wrong with the geometry of the rocker rotation point and fixed it.