Hi all,
I’m currently trying to validate a vehicle model using CM4SL and when I try to integrate the acceleration signal, error seems to accumulate.
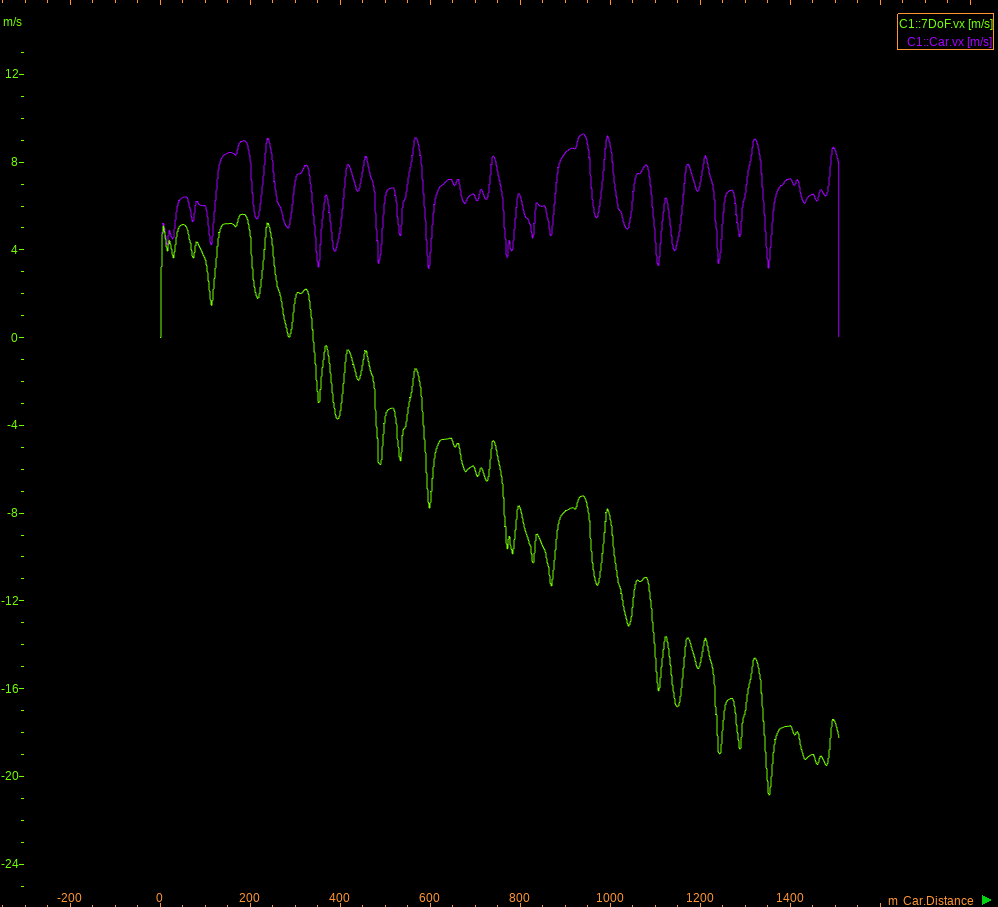
I’ve integrated the Car.ax signal to a new variable(7DoF.vx) to check if the problem wasn’t from my model and this is the deviation that I’m getting:
Can anyone help me with this?
Thank you!
Hi Zik,
How have you implemented the integration? Has this been done in Simulink? Could you share your implementation?
Is there anything specifial about this model you have developed? Have you replaced any parts of it with your own custom model? Do you see similar disparities if you use one of the example models provided with CarMaker?
David
Hello David,
Many thanks for the prompt reply.
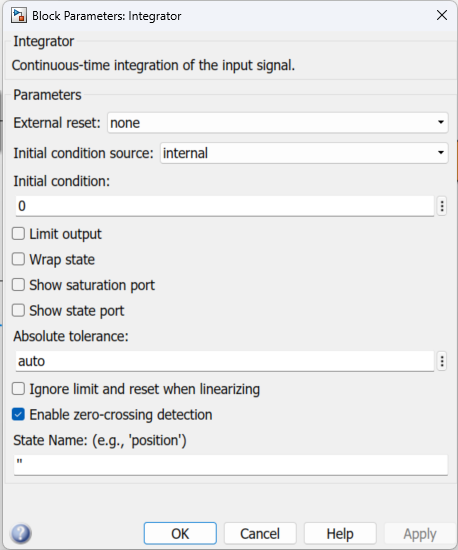
I’ve used a default Simulink integrator block:
I didn’t replace any parts, I’m just comparing variables that I’ve created with IPG default UAQ.
This is what I’ve done:

Car.ax and 7DoF.vx aren’t being used somewhere else in the model.
Which solver are you using in your Simulink model?
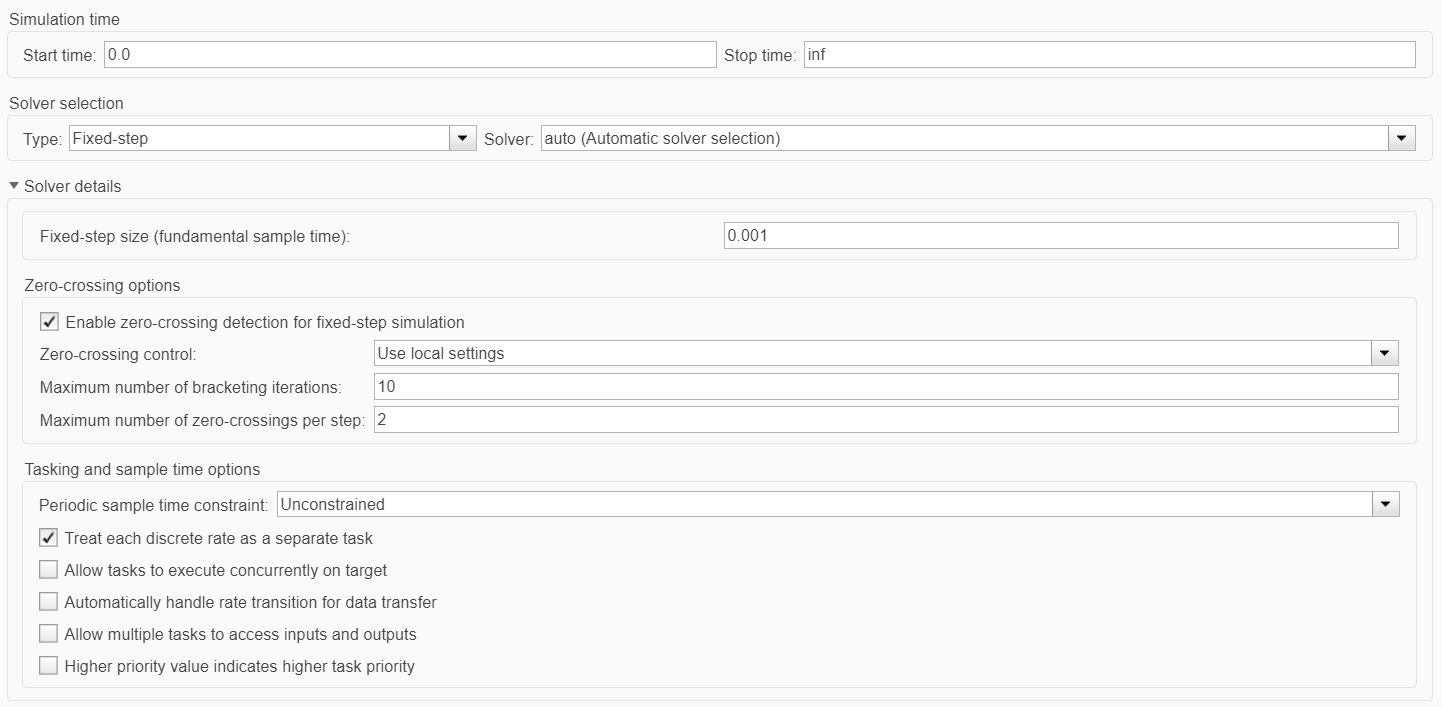
I’m using these settings:
I’ve also tried using the variable-step solver > auto and other types of fixed step solver.
Thanks. May I also ask why you need to develop your own integration when the signals you require should directly be available in CarMaker?
I was trying to assess the correlation between the outputs of my 7DoF model and the IPG outputs. The velocity input will then be used to calculate combined slip.
I might be unaware of a better method to do this, so please let me know if that’s the case.
Thank you again!
I am struggling a little bit to visualise exactly what you are trying to achieve. Are you able to share the Simulink model? I think this is probably the quickest way forward to try and debug. I could provide a private file sharing link if you prefer this so feel free to send me a private message.