Hello all,
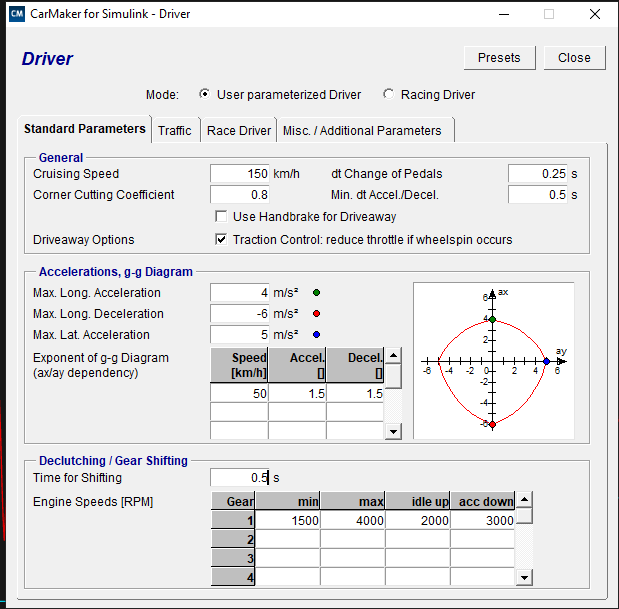
I am giving a target speed to my IPGDriver. The IPGDriver is following the reference speed, but not very well. I have attached a figure of my setup for the IPGDriver. I thought maybe making the driver more aggressive would make the speed tracking better. But, as you can see in the attached figure, the speed is followed not very good.
Could you please give me some suggestions, on how to improve speed following by the driver?
Kind Regards,
Maryam