Hi,
I am from a E-Formula Racing team called EESC USP Tupã and I was trying to simulate a failure condition in our transmission system, in such a way that if, for some reason we face a mechanical problem, we’d be able to restrain our motor torque, basically stopping our vehicle. We have a single gear transmission, connected directly to our rear wheels.
First I’ve imagined a condition where the transmission gets stuck, which would cause the wheel to stop rotating. In this situation, as the motor would rotate and the wheel wouldn’t, the gear ratio would be infinite.
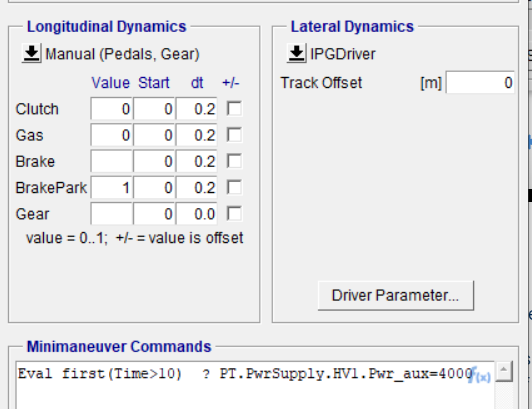
I tried to develop a situation like that in my Simulink Model. Using a Combox, I could change my condition between “OK” and “Failure”. When pressing the latter, the gear ratio would assume a nearly infinite value. But when checking this implementation in IPGControl, I noticed that, despite changing our gear ratio (which was observed in IPGControl), the wheel velocity didn’t change at all.
Here PT.GearBoxM.i is set to 7 (default value) and when I click the “Failure” button it goes to 9999999999 (infinite), but nothing seems to change. I also tried to do it with PT.GearBoxM.i_TrqIn2Out, but it again didn’t seem to work.
Why didn’t my gear ratio affected my wheel roational speed when I switched it while simulating it? Carmaker doesn’t allow real time changes like that? Am I doing a stupid mistake?
If so, how could I create and test a failure mode control in Carmaker?
Thanks in advance,
Guilherme.
Good morning,
You can use PT.Control.GB_M.Clutch.Pos and set it to 1, this would disconnect the electric motor from the rear wheels and then set DM.BrakePark to 1, this would lock the rear wheels (you can actually set the pressure of the rear brake to avoid a complete lock up).
Hello, thank you for the clarification.
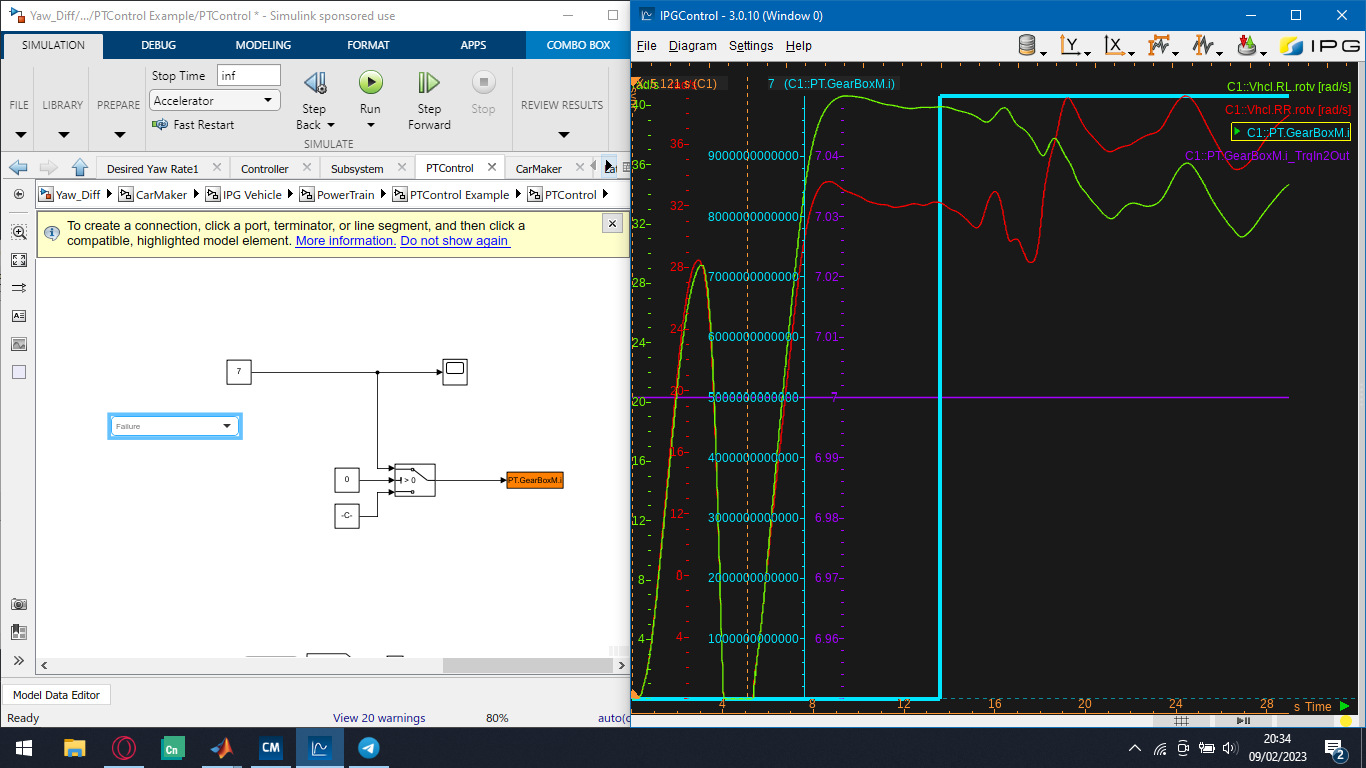
I tried changing PT.Control.GB_M.Clutch.Pos value to 1 whilst simulating and apparently it didn’t affect DM.BrakePark condition and therefore it didn’t stop the vehicle, as intended. This situation is shown in the image below.
I later tried to change DM.BrakePark value to 1 directly and it worked, the angular wheel velocity of the rear wheels have dropped to zero, and I visually confirmed it throught IPGMovie. I’m writing this message because the first method didn’t actually work, which got me thinking if I did a mistake.
My hypothesis is that maybe, after starting the simulation, these two variables don’t share an interdependence? Not sure about it though… can you confirm it?
Thanks again,
Guilherme.
Hi Guilherme,
the two variables are independent that’s why I suggested to first use PT.Control.GB_M.Clutch.Pos which would disconnect the electric motor from the rear wheel and then DM.BrakePark. This would avoid the electric motor (connected to the differential) to lock up that is something you wanted to avoid initially.
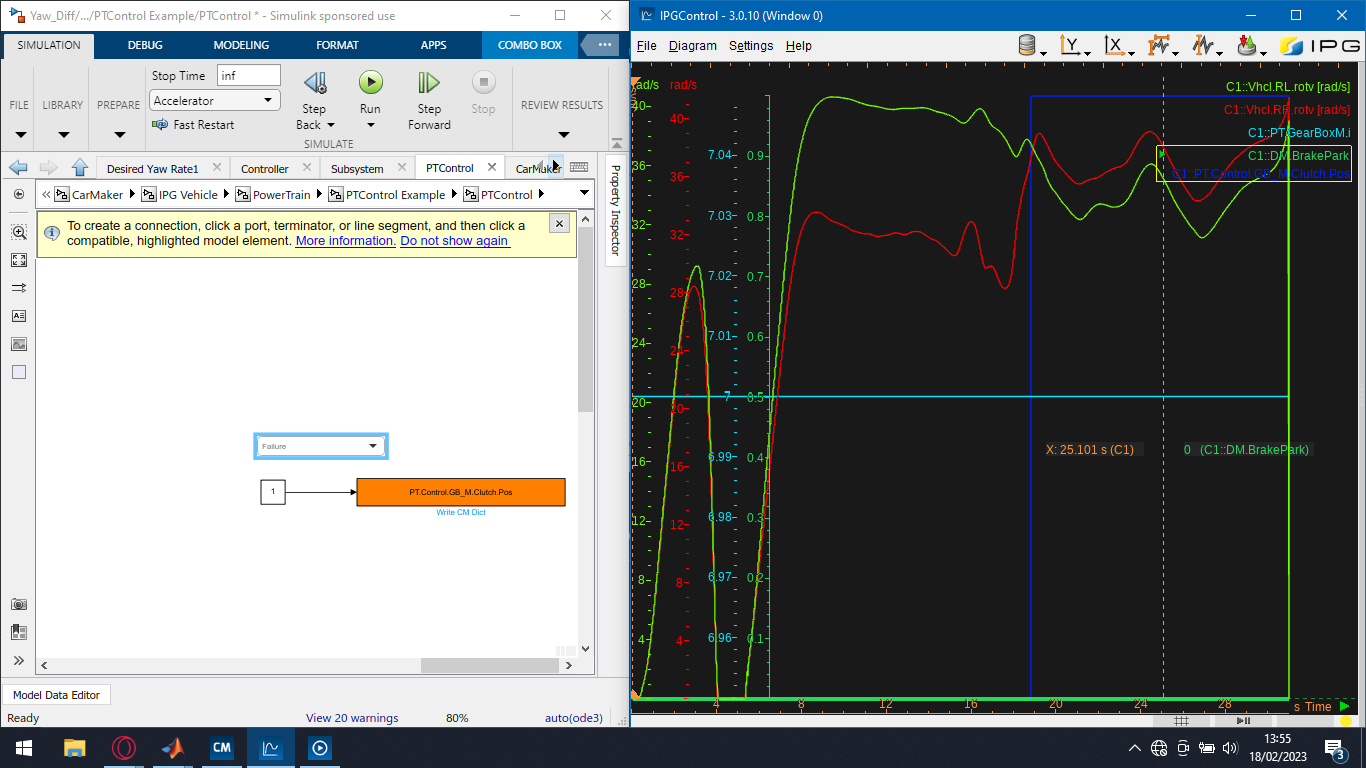
Hi, I’m from the same E-Formula Racing team as Guilherme and now we are looking to this failure condition by the angle of the stall condition, this mean, supposing that the car had a wheel locking, this will cause a lock on the rotor and then the engine will be consuming an electric current with the rotor locked and so, this could burn up the engine, among other problems and, this current will be the stall current, that we want to avoid the most possible. When we tested the failure case on CarMaker we noted that the current that became from the battery as soon as we imposed the failure condition (through the variable DM.BrakePark as sugested), we observed that the current immediately gone to zero, so there was no stall current, but we think that this could be some configuration or limitation on CarMaker. So the question is: how can we simulate the situation when the rotor is locked, but the engine is still on?
Hi Gytakemoto,
sorry I haven’t received any notification about the new reply on this post.
It is not possible to simulation through a normal manouvre command.
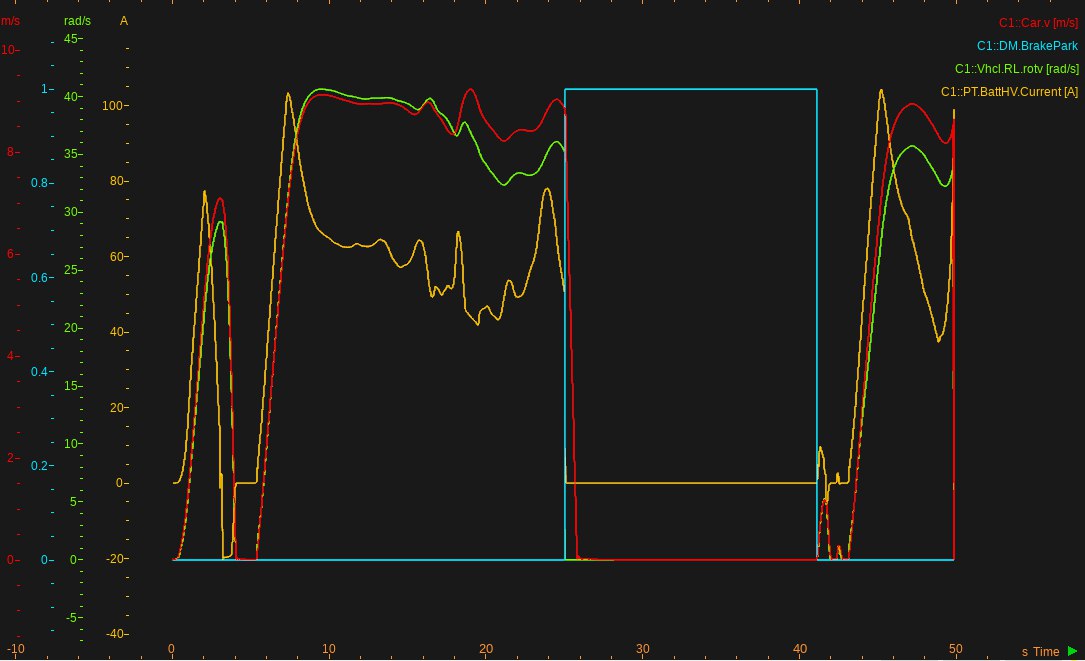
What I could think of was a minimanoeuvre command like this below
Eval first(Time>10) ? PT.PwrSupply.HV1.Pwr_aux=4000
For example if during this manoeuvre the wheels are locked (example done with the brake park 100%- rear wheels locked) then with that minimanoeuvre command a current of 10A is drawn from the HV battery (400V 10A = 4000W)