Hello all,
I have created fuggy logic based generic AEB model to integrate in vehicle control via FMU plug in option.
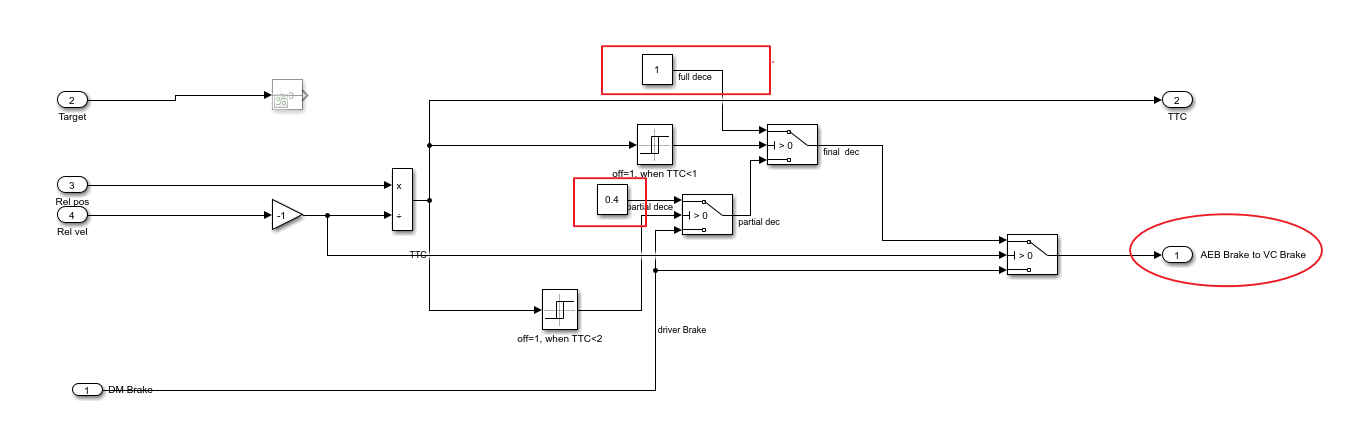
The FMU plug in model works somehow if I do use Brake deceleration value from 0 to 1 in terms partial or full deceleration in the model because I connect my output to Vehicle Control Brake in order to activate AEB.
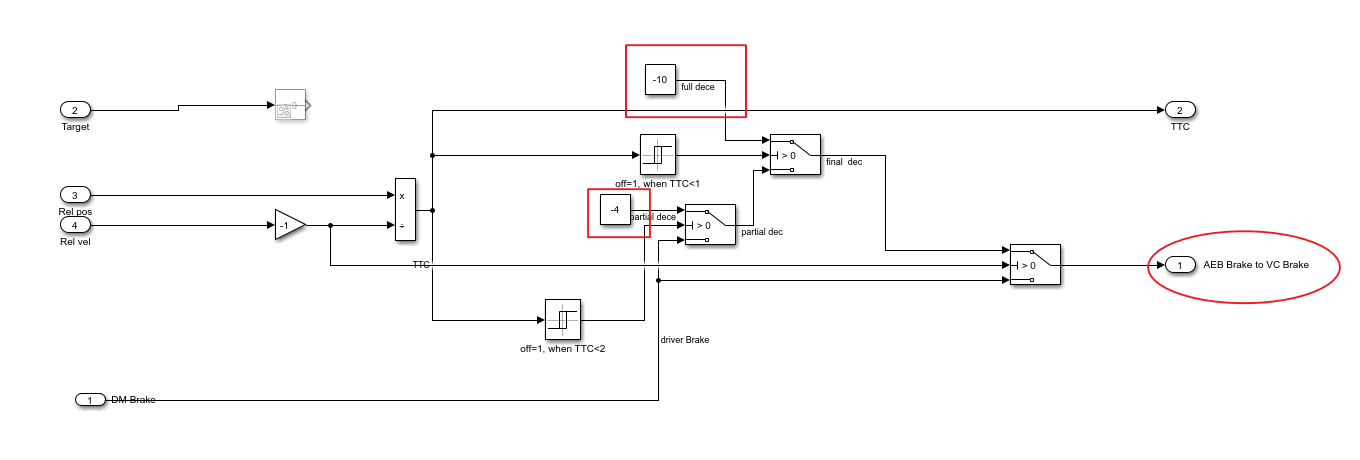
But I actually want something else, for example if I want to give input deceleration of -10 m/s^2 then in the output of Vehicle control brake it does not consider valid out (because it only consider value from 0 to 1).
So the question is … is there any way I can know that at what value or factor (from 0 to 1) sould I use equivalent to -10 m/s^2 deceleration in model? How to define it?
I am attaching the pictures of What I want and What I have now.
I tried to explain as easy as I possibly could, but still if you have more questions on it please ask anything more on it.
Thank you!