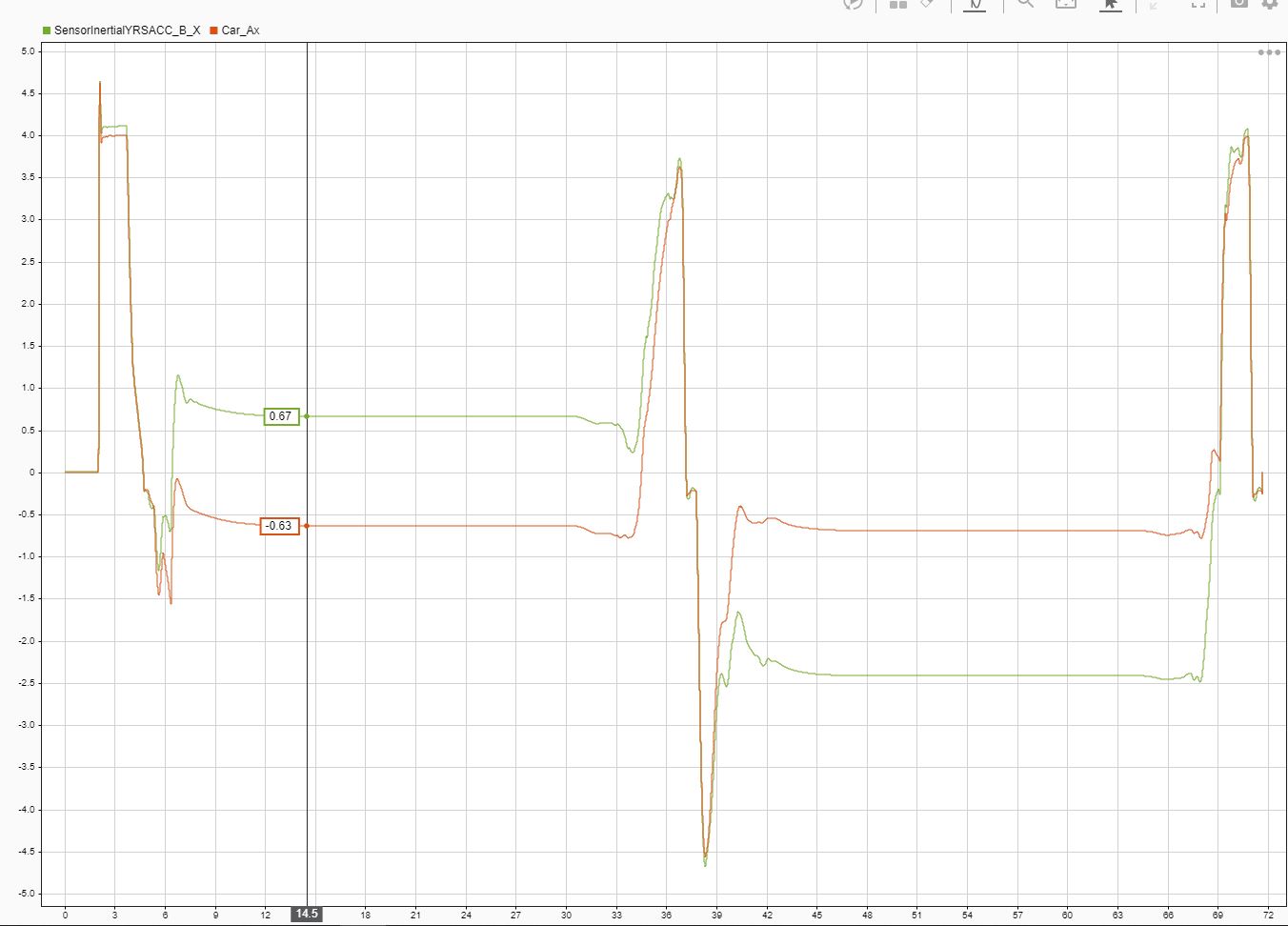
I am trying to understand how “Car.Ax” value is obtained from “Sensor Inertial YRS ACC_B.X”. For the normal both values almost looks similar and when slope is added in the maneuver there is a difference in the value. For eg I tried the Parking Garage example and got this result.
Can anyone help me with understanding this variation and how to obtain Ax. Thanks in advance.
Good morning Chandrup,
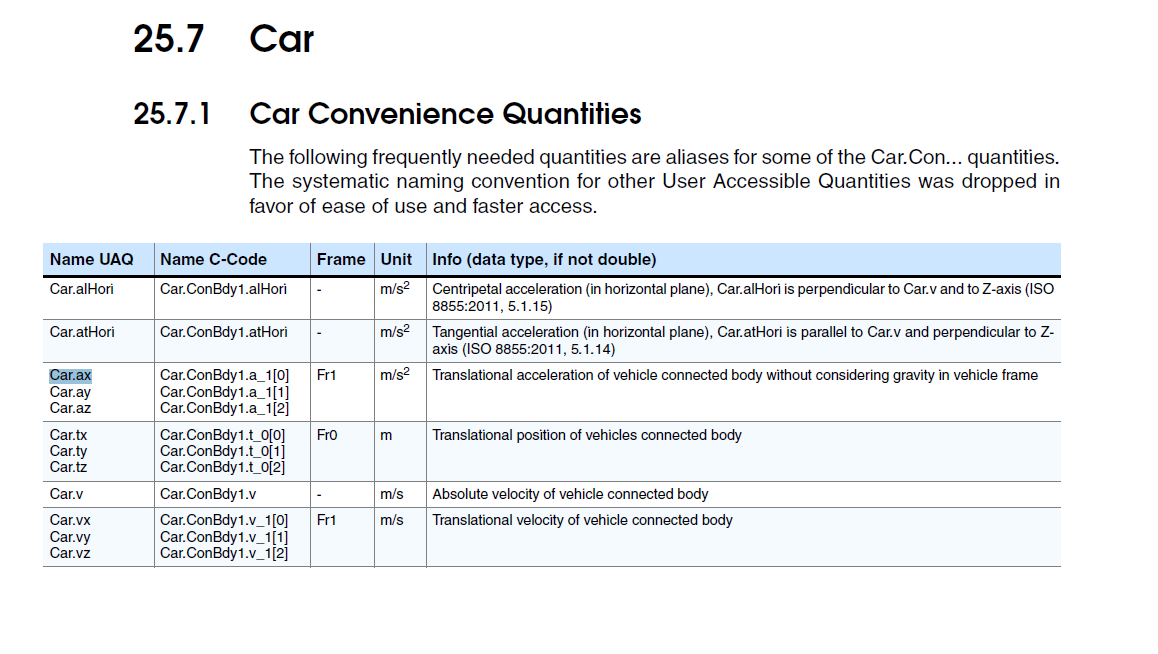
if you want to get purely the acceleration of the vehicle then Car.Ax is the quantity to look at. It is defined in the Fr1 system linked to the vehicle. You can find the definition in the reference manual
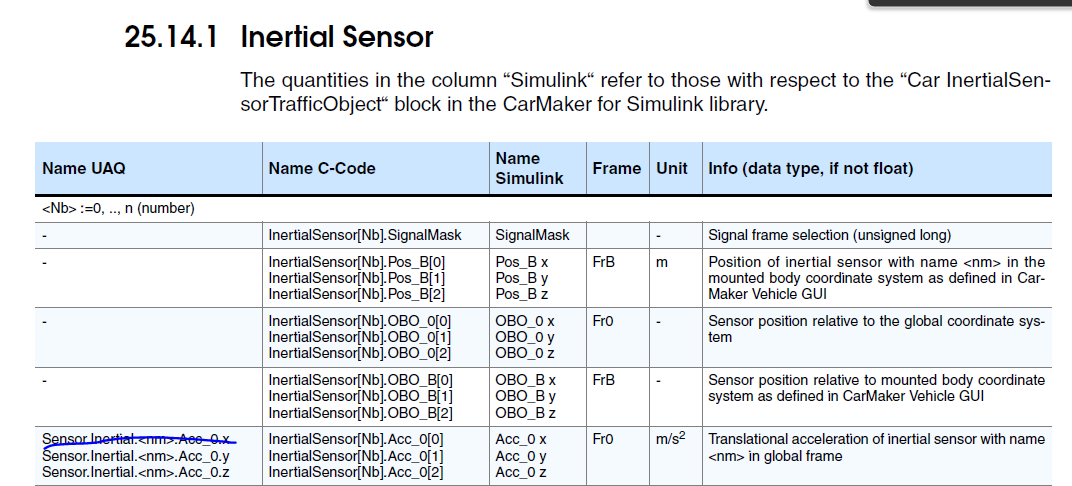
Sensor Inertial YRS ACC_B.X is instead defined in the Fr0 system
Hope this solves your query.
Thank you @roberto.ortolan for your reply. Actually I am trying to calculate the vehicle acceleration from the Inertial sensor output. I think Car.ax is the acceleration value processed from the raw sensor signal which is “Sensor Inertial YRS ACC_B.X” . Please correct me If I am wrong.
Hi Chandrup,
Car.ax doesn’t take into account the road slope (gravity) therefore It will be different than the Inertial Sensor acceleration according to the definition.
Hi @roberto.ortolan , So if I have the Inertial sensor acceleration value How can I get Car.ax value ?
If you have the Inertial Acceleration sensor Sensor.Inertial.YRS.Acc_B.x to find the Car.Ax value you would need to find the component of the gravity acceleration in the x axis since Car.Ax doesn’t not include the slope.
Hi @roberto.ortolan Thank you. I will try this approach.