Hi.
I was trying to model longitudinal load transfers through mechanical equations and compare it with the values measured by Carmaker.
My goal is to determine the total load of each rear tire, specially during straight acceleration runs, but preferably in any condition.
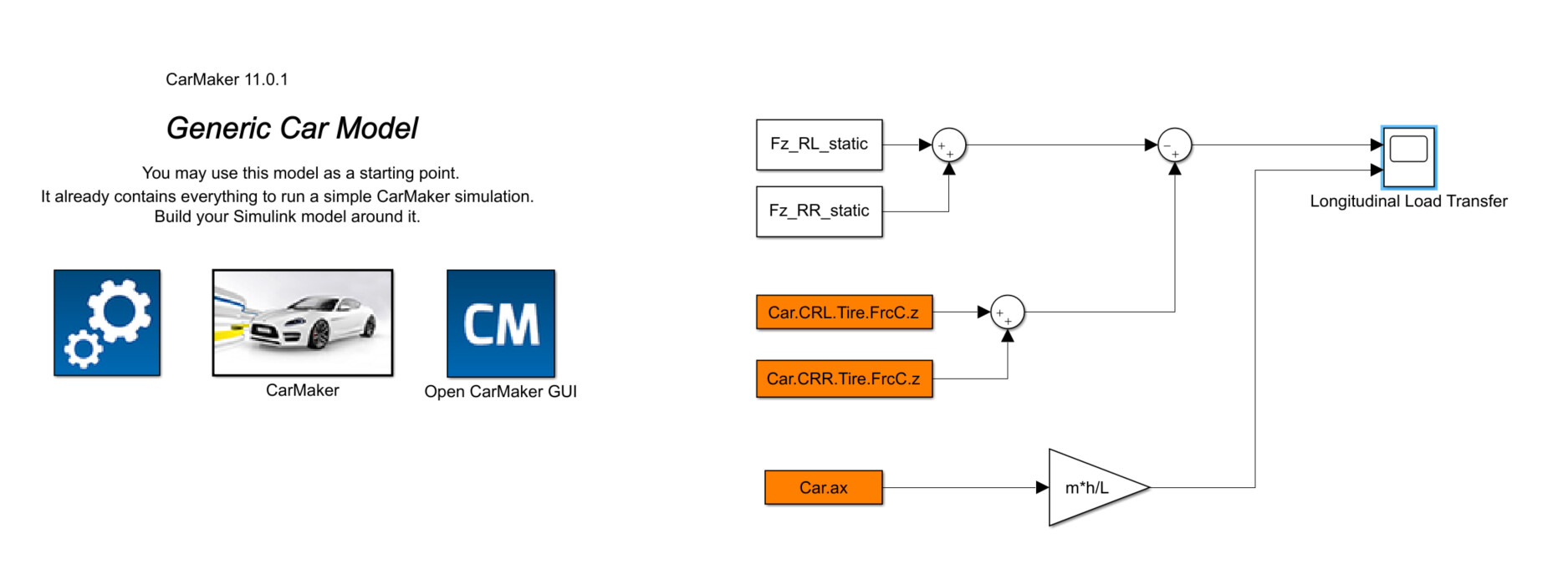
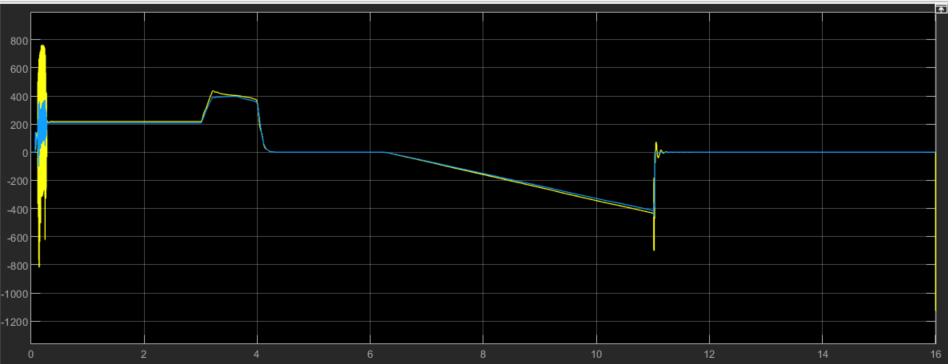
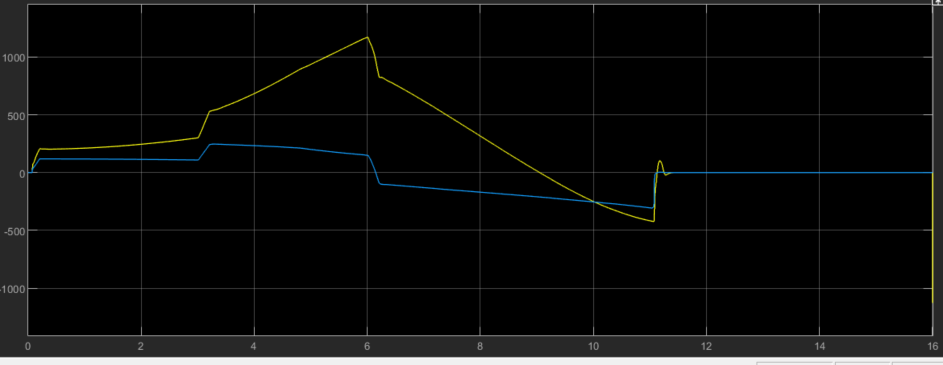
Comparing my results (exporting it from simulink to IPGControl) with Car.FzRL and Car.FzRR I noticed they are a little different, that’s why I’d like to know how does CM estimate it. It can be seem in the following figure:
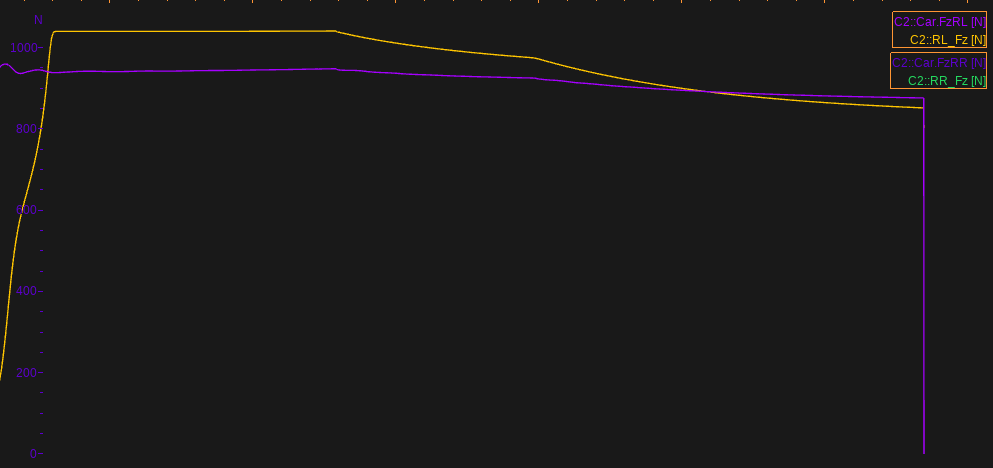
Notice I’m not only considering the longitudinal load transfers in the RL_Fz and RR_Fz, but also lateral, static and aerodynamic loads.
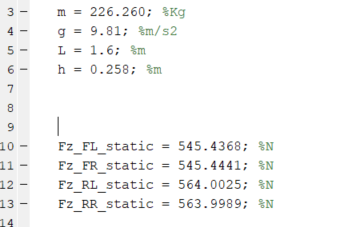
I am using the following equation to longitudinal load transfer:
\Delta W_r = \frac{h}{2L} W a_x
Where:
h = height of center of gravity (m)
L = wheelbase (m)
a_x = longitudinal acceleration (m/s²)
W = car weight (kg)
The rest of the equations can be seem in this document.
I suppose CM uses much more complex set of equations, but I haven’t had luck searching for better options. Other reason I can think of is that my tire model is pretty unrealistic right now, but that’s something I’m still working on.
One last hypothesis is that maybe there are some parameters in my vehicle file that’s not compatible with the values I am using on my Simulink model, but I’m also working on it and I’ve checked it multiple times.
Anyways, any help would be appreciated! I am really stuck on this problem.