version
Carmaker 14.0
ubuntu 22.04
ros2 humble
I want to communicate between CarMaker and ROS via CAN communication.
My goal is to control the vehicle in CarMaker using ROS by sending linear and angular inputs from a keyboard.
Do you know any examples or detailed methods for achieving this?
Hello,
There is an example project in the FAQ of the IPG Customer Area here:
This project is a template of how to communicate between CarMaker and ROS.
If you are a student or associated with a university that has an FSAI team, there is also a ready-made package that all teams receive from IPG; it demonstrates the exchange of a few signals from/to CarMaker and ROS2. You can ask your FSAI team for the package.
HI bogomil !
thank you for your reply
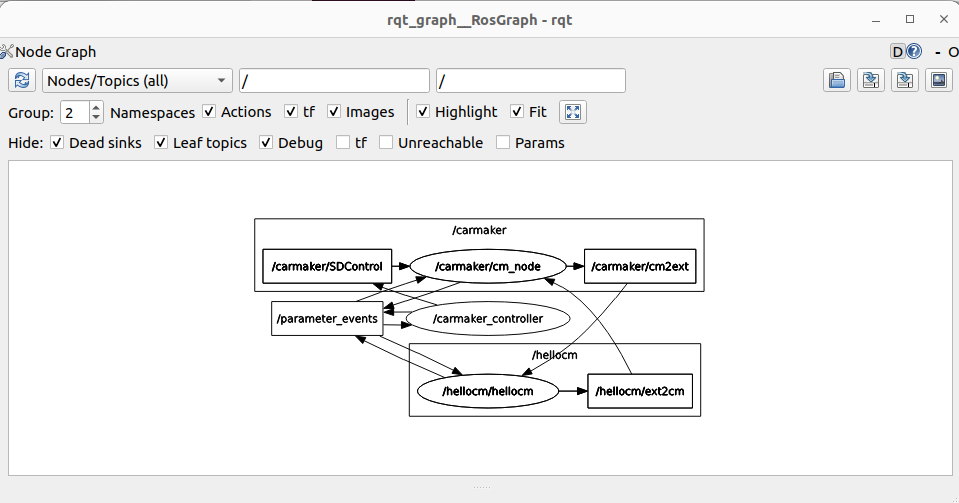
I have already succeeded in exchanging messages between ROS2 and CarMaker! Now, I want to see the car in CarMaker move when gas and steer messages are sent from ROS in real-time. I confirmed that the messages are being input into the cm_node from ROS as shown in the picture below, but the car in CarMaker is not moving at all.