I want to create the model of a suspension but it is a double wishbone direct acting suspension and I don’t know how to implement this in IPG Kinematics. Because the templates for double wishbone only allow to choose between push or pull and my suspension doesn’t have rockers, for example.
Do you know how can I implement my suspension in IPG Kinematics?
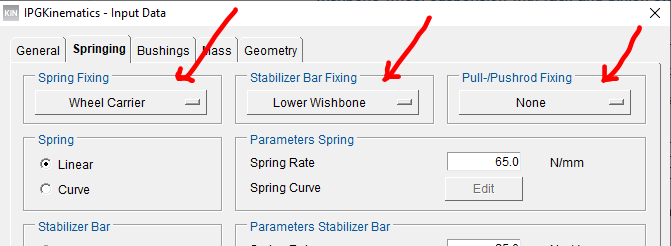
You don’t need to build your double wishbone with Pull-/Pushrod. You can change it in the section of IPG Kinematics of Vehicle Data under Srpinging. According to your selection some of the points are “active” or not. There you can chose what configuration you have including to add or remove Pull-/Pushrod
You can find all this information and more in the Reference Manual of the IPG Kinematics (IPG Kinematics GUI → Help → Reference Manual)