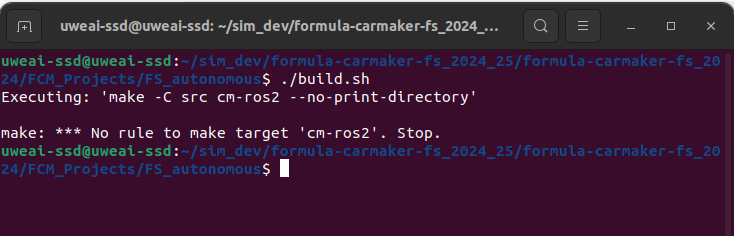
I’m currently following the Formula CarMaker instructions for building a ROS2 workspace; section ‘3.2 ROS2 Quick Start’ of the CMRosIF User’s Guide for FS Autonomous for 13.0.1. When I try to run the build.sh script at the top of the FS_autonomous project I get the following error:
System is currently running Ubuntu 22.04 with ROS2 Humble.
Any help is appreciated.
Hello,
This is a known issue, and we are about to release a patch to the FSAI package to fix it.
If you need the fix urgently, I can provide it here as well, otherwise in the next 2 weeks the latest version will be released. There are other expected changes that may be significant. The most important one is that the RSI sensors (LiDAR and Camera) will work from the MovieNX environment instead of IPG Movie. MovieNX is built with a modern 3D engine, so it looks much better than Movie. This will hopefully improve the camera simulations.
Regards,
Bogomil
Hi Bogomil, if we could get a temporary fix for this that would be great so our team can continue development.
Kind regards,
Isaac
Hello,
Sure, no problem. This will be useful for other teams in the meantime as well.
The Makefile in the “src” folder of the FS_autonomous project is faulty. It was a mistake in the conversion of the project to the latest CarMaker.
If you take the attached Makefile and place it in the “src” folder of the project, the compilation should work.
Makefile.zip (1.9 KB)
Hi Bogomil,
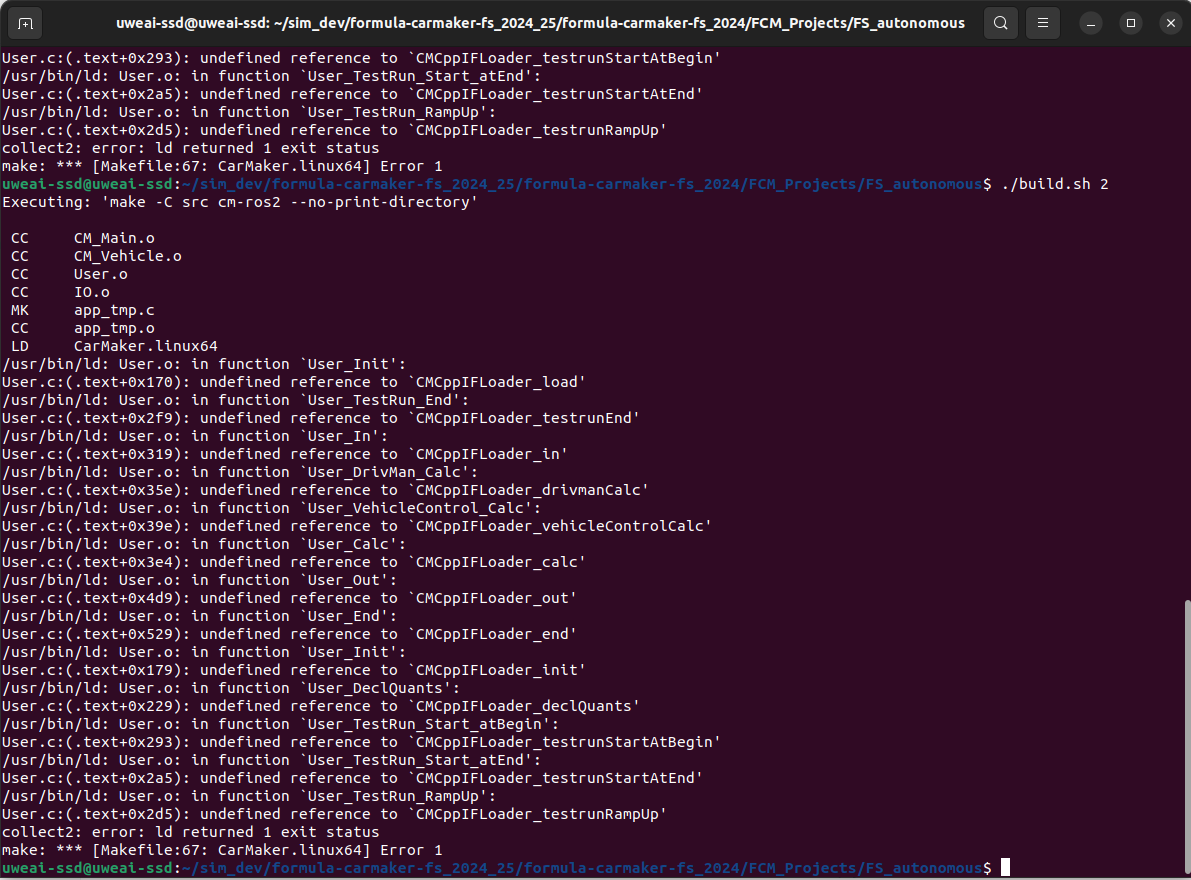
The top level build.sh file does run now, but is still getting some issues as shown:
Hello,
All these functions are defined in the “FS_autonomous\include\cmcppifloader.h” header file. Check that this is available in your project. It should be!
These functions are then implemented inside a library in the “lib” folder of the project. However, to simplify things somewhat, the library is actually a symbolic link. Sometimes that link gets broken when passing the project between Windows and Linux or storing it in certain formats. I suggest you re-create the symbolic link and try again.
From the “FS_autonomous” folder, remake the following link in the “lib” sub-folder and try again:
cd lib
sudo ln -sfn libcmcppifloader-linux64.so.1.0.0 libcmcppifloader-linux64.so
Hi Bogomil,
I can confirm that the build works after updating the makefile and then rebuilding the symbolic link in /lib. We can see ROS data output from the simulator now. Thanks very much for all your help on this.