Hello,
I want to dynamically define the relationship between the angular velocity and torque of an engine in a program. I aim to create a code block with Simulink that will allow this relationship to change throughout the simulation.
I have developed a Simulink code block. What I actually want to inquire about is how I can integrate this with IPG.
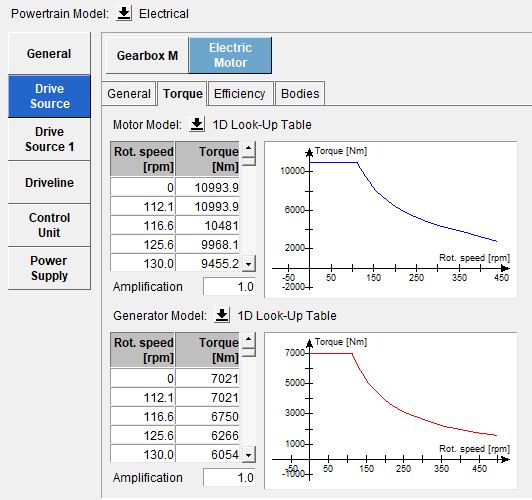
What I actually aim to do is to input the torque and angular velocity values located here parametrically, and for the Simulink code output to assign values to these parameters.
Hi,
You will need to use CM4SL.
Open one of the examples like the generic.mdl and starts from there to build the maps and models
Indeed, I know that. What I don’t know is which signal needs to be changed. 
Hi,
The model UserPowerTrain.mdl in the CM4SL folder has got everything you need.
Build a map like they did in that model with rot speed of the motor/motors (if you have more than one) and Torque.
All the quantities you need with their description is in the reference manual under the section UAQ.
Ok, I will try it. Thank you so much!
