Hi, I’m studying vehicle models like double track model.
And I make my own vehicle model and currently validate those model now.
For validation, I choose several scenarios like uniform circular motion, double lane change, straight line, etc.
So this is the process.
- Logging vehicle ground truth data for control input (currently tire forces and steering angle)
- Comparing model’s estimation value and ground truth vehicle motion data.
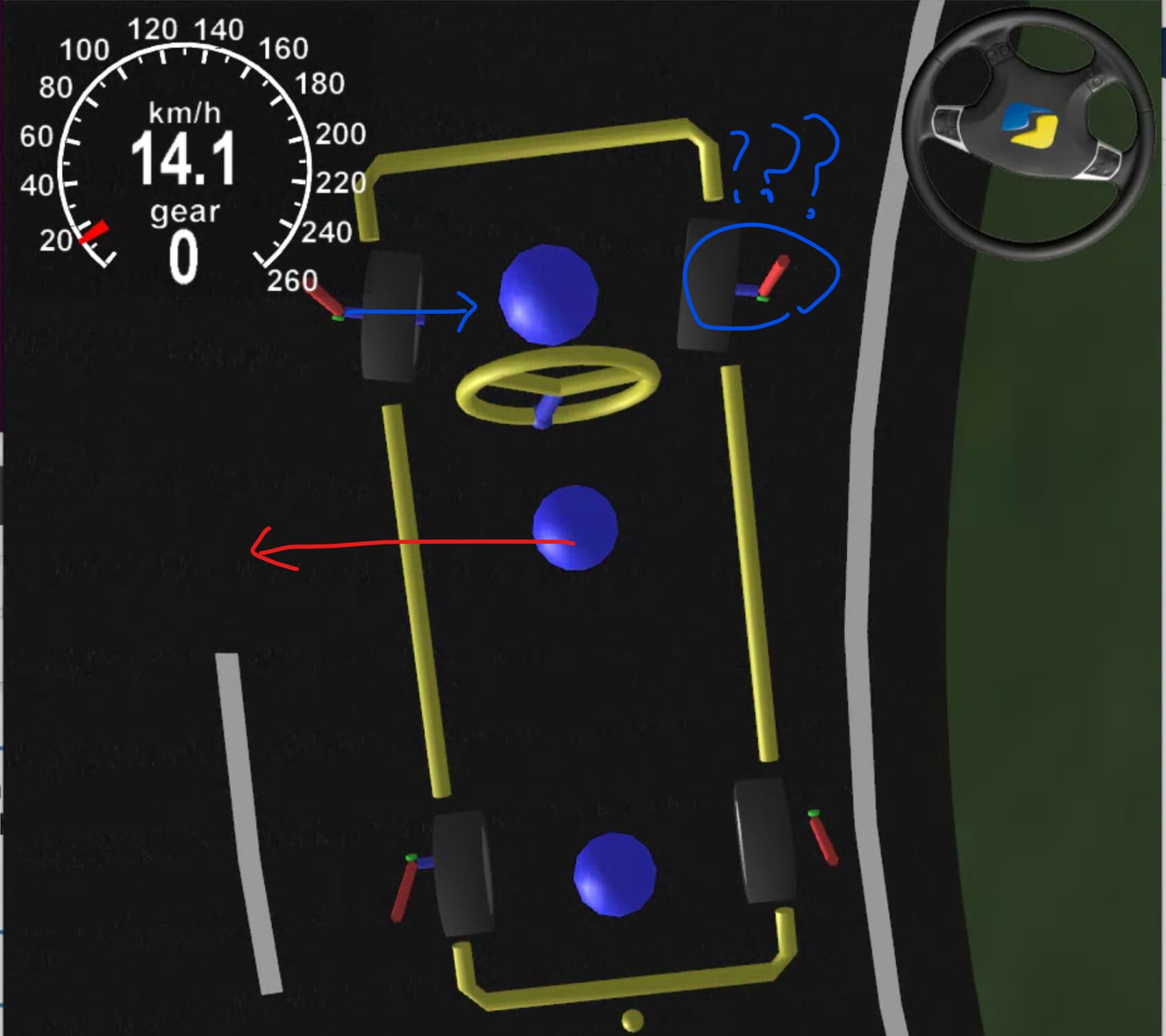
When I do these thing … I captured something weird at uniform circular motion.
That is Tire FL (Front Left) & FR (Front Right)'s Y-axis force’s direction is different!
and slip angle of those too!
In my common knowledge, centrifugal force and tire’s y-axis force is equilibrium.
And all y-axis forces have opposite direction with centrifugal force. but FR-y axis force’s direction is same with centrifugal force.
It happened only in lower speed uniform circular motion. Please give me answer why that thing is happen, and how!
Exact Circumstace
- Radius : 15m
- Controller
- Lateral : IPG Driver
- Longitudinal : Speed Control - 13.68 km/h (for 1m/s^2 lateral acceleration)
- Vehicle : Demo_Ioniq5_2W Default Setting
Thanks for watching.