Hello everyone!
My current environment is:
- ROS2 Humble
- CarMaker 14.0
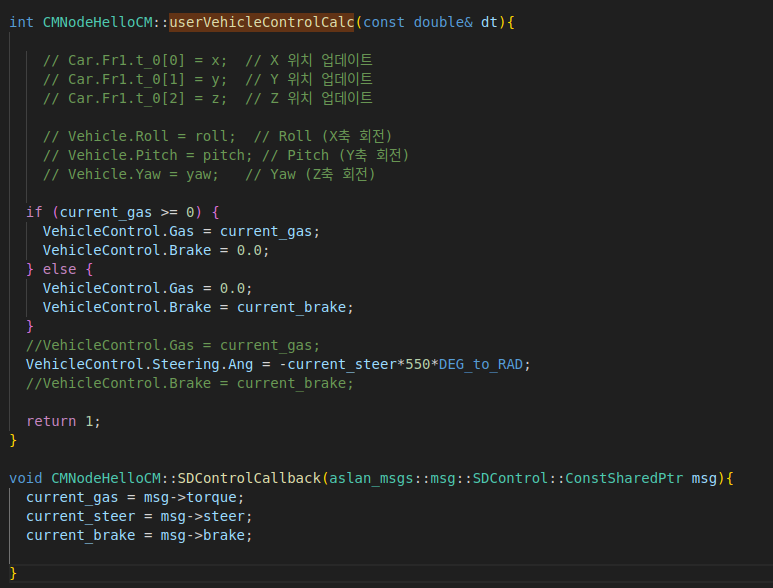
I have confirmed that the simulation works by sending Gas, Steering Angle, and Brake values from ROS to CarMaker.
Now, I want to send x, y, z coordinates along with roll, pitch, and yaw values using a geometry message and see the vehicle move accordingly in the simulation. However, I am not sure how to do this.
In CarMaker, updating the Gas, Steering, and Brake values inside the userVehicleControlCalc function successfully moves the vehicle. However, updating the position within the same function does not work.
Which function should I use to update the position correctly?
Thank U