If there is something that already works then copy it!
There is currently no Simulink example for an electrical powertrain controller, but if you select the electrical powertrain control (Vehicle>Powertrain>Control Unit>PT Control>Control Model: Eletrical) using your vehicle T-06_V2 you can observe and compare the 53 signals coming out of PT.Control.
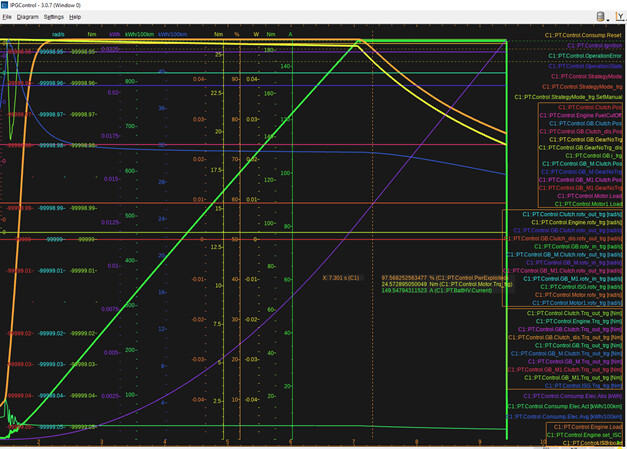
There are 2 signals that change significantly as the PT.BattHV.Current signal is limited to 150 A. The first is PT.Control.PwrExploited which is use for visualization in IPGInstruments. The second is PT.Control.Motor.Trq_trg which is the target torque send to the motor – bingo!
How do you limit the PT.Control.Motor.Trq_trg (or PT.Control.Motor.Load) is up to you, but my recommendation is to use PT.Motor.rotv, your electrical motor torque map, the efficiency of your electrical motor, the voltage of the battery and a constant current value of 150 A to calculate a Dynamic Torque/Load limit for your controller.
Let us know about your final implementation!